大角度单摆运动的计算机模拟

2006年6月
重庆文理学院学报(自然科学版)J un 1,2006 第5卷 第2期J ournal of Chongqing Universi ty of Arts and Sciences (Nature Sciences Edi ti on)Vol 15 No 12
大角度单摆运动的计算机模拟
龙晓霞
(重庆文理学院 物理与信息工程系,重庆 永川 402160)
[摘 要]大角度单摆问题属于非线性问题,很难用解析的方法求其运动.本文利用MATLAB 软件对大角度单摆在无阻力无驱动、有阻力无驱动、有阻力有驱动3种情况下的运动进行了计算机模拟,并对运动情况进行了分析.
[关键词]单摆;计算机模拟;MATLAB
[中图分类号]O4-39 [文献标识码]A [文章编号]1671-7538(2006)02-0028-04
1 引言
MATLAB 数学软件是欧美十分流行的通用性很强的数学软件,占据了数学软件市场的主导地位.它可以对非线性微分方程进行数值求解.
当单摆的摆角小于5b 的时候,单摆的运动微分方程为线性方程,可以解析求解.但当单摆做大摆角运动时,其运动微分方程为非线性方程,很难用解析的方法讨论其运动.利用MATLAB 软件可以对单摆运动进行数值求解,模拟不同情况下大角度单摆的运动,其结果非常直观、形象.
2 大角度单摆运动的模拟
2.1 大角度单摆的运动微分方程
单摆在做大摆角运动的情况下,考虑到空气阻力和驱动力的影响,其运动微分方程为
[1]:
d 2H d t 2+X 2sin H +2b d H d t =f cos pt 1其中,b 为阻尼因数,由阻力大小决定,f 和p 由驱动力决定,X 2=g l 由系统本身决定.2.2 无阻力、无驱动下大角度单摆的运动
2.2.1
微分方程
图1根据大角度单摆的运动微分方程,在无阻力无驱动时,
也就是b =0和f =0时,其运动微分方程为:
d 2
H d t 2+X 2sin H =012.2.2 相图及其分析
由图1可以看出:
(1)E <2mgl 时,摆锤在-P -P 的势阱中作周期运
动,其相轨迹为一闭合曲线.
(2)E >2mgl 时,摆锤在势场中作定向运动,且H 可以
趋向?],其相轨迹为两条不相交的曲线,对应两个不同的X [收稿日期]2005-09-27
[作者简介]龙晓霞(1965-),女,重庆荣昌人,副教授,主要从事力学教学及研究1
[基金项目]重庆文理学院2005-2006年教育教学研究项目(05015)1
运动方向.
(3)E =2mgl 时,摆锤运动处于临界状态.当其H 对应势能曲线的极大值时,摆锤速度为零.下一时刻的运动具有不确定性,摆锤既可能沿原运动方向运动,也可能改变运动方向.
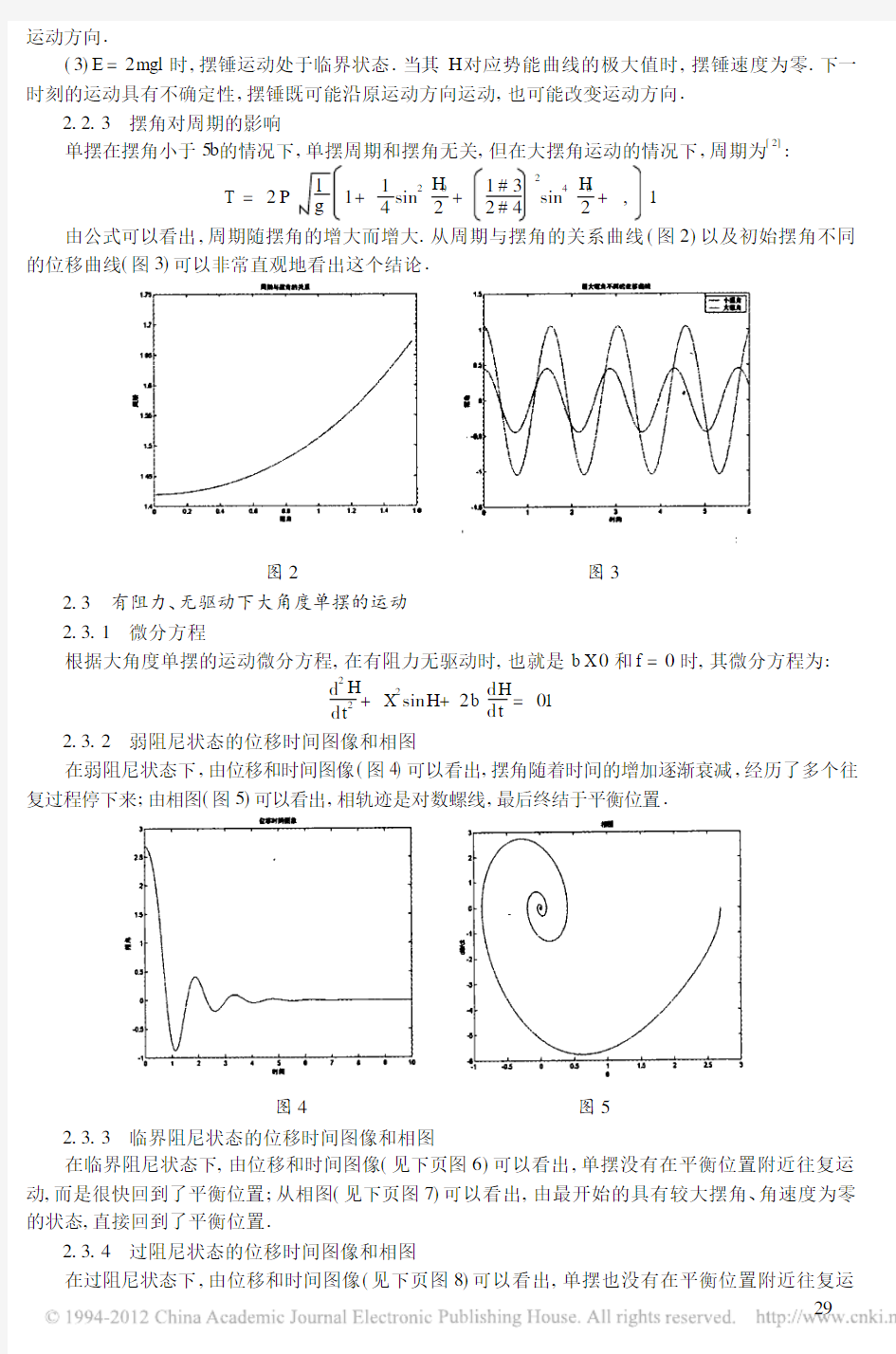
2.2.3 摆角对周期的影响
单摆在摆角小于5b 的情况下,单摆周期和摆角无关,但在大摆角运动的情况下,周期为[2]:
T =2P l g 1+14sin 2H 02+1#32#42sin 4H 02
+,1 由公式可以看出,周期随摆角的增大而增大.从周期与摆角的关系曲线(图2)以及初始摆角不同的位移曲线(图3)可以非常直观地看出这个结论.
图2 图32.3 有阻力、无驱动下大角度单摆的运动
2.3.1 微分方程
根据大角度单摆的运动微分方程,在有阻力无驱动时,也就是b X 0和f =0时,其微分方程为:
d 2H d t
2+X 2sin H +2b d H d t =01 2.3.2 弱阻尼状态的位移时间图像和相图
在弱阻尼状态下,由位移和时间图像(图4)可以看出,摆角随着时间的增加逐渐衰减,经历了多个往复过程停下来;由相图(图5)可以看出,相轨迹是对数螺线,最后终结于平衡位置.
图4 图5
2.3.3 临界阻尼状态的位移时间图像和相图
在临界阻尼状态下,由位移和时间图像(见下页图6)可以看出,单摆没有在平衡位置附近往复运动,而是很快回到了平衡位置;从相图(见下页图7)可以看出,由最开始的具有较大摆角、角速度为零的状态,直接回到了平衡位置.
2.3.4 过阻尼状态的位移时间图像和相图
在过阻尼状态下,由位移和时间图像(见下页图8)可以看出,单摆也没有在平衡位置附近往复运
动,但和临界阻尼状态相比,经历了更长时间才回到平衡位置1从相图(图9)可以看出,单摆由最开始的具有较大摆角、角速度为零的状态,直接回到了平衡位置,和临界阻尼状态相比,其振动速度更小.
图6 图7
图8 图9
2.4 有阻力、有驱动下大角度单摆的运动
2.4.1 微分方程
根据大角度单摆的一般运动微分方程,在有阻力无驱动时,也就是b X 0和f X 0时,其微分方程为:
d 2
H d t 2+X 2sin H +2b d H d t =f cos pt 1 2.4.2 相同阻尼不同驱动力的位移时间曲线和相图
图10 图11
图12图13
图14图15
图10、图12、图14分别表示阻力相同、驱动力不同情况下的位移时间图像和相图.图10表示驱动力频率和系统的固有频率接近的情况,可以看出,系统的振幅最大,发生了共振现象;图12、图14表示驱动力频率和系统的固有频率相差较大的情况,系统的振幅较小1从相图反映的情况看,受迫振动在做等幅振动之前运动情况是相当复杂的,但它们经过一段时间以后均做等幅振动,相图为一闭合的椭圆.另外还可以看出,受迫振动的频率与驱动力频率相同.
3结语
本文运用MATLAB对无阻力无驱动、有阻力无驱动、有阻力有驱动情况下的大角度单摆的位移时间图像、周期与摆角的关系以及相图进行了分析,分析结果和理论上所得到的结果是一致的1这种方法可以非常直观、形象地反映单摆的运动情况,避免了求解复杂的方程.
[参考文献]
[1]漆安慎,杜婵英.力学[M].北京:高等教育出版社,2000.
[2]韦得泉,王秋芳.单摆的角振幅对其周期的影响[J].洛阳大学学报,2003,18(2):103.
[3]胡静,彭芳麟,管靖,卢圣治.理论力学的计算机模拟[M].北京:清华大学出版社,2002.
[4]陈怀琛.MATLAB及其在理工课程中的应用指南[M].西安:西安电子科技大学出版社,2000.
C omputer Simulation for the Motion of a Single Pendulum in Large Angle
LONG Xiao-xia
(Dept.of Phys i cs and Information Engi neering,Chongqing University of Arts and Sci e nces,Yongchuan Chongqing402160,China) Abstract:A single pendulum in a large angle region involves nonlinearlity,which cannot be solved analytically. The simulations on the motion of a single pendulum in a large angle re gion are carried out by using MATLAB under three conditions that there are no resistance and no driving;resistance and no driving;resistance and driving,and the motions are discussed.
Key words:single pendulum;computer simulation;MATLAB
(完整版)探究单摆的振动周期正式版.doc
第四节探究单摆的振动周期 从化中学李东贤 【教学目标】 一、知识与技能 1.知道什么是单摆;理解摆角很小时单摆的振动是简谐运动; 2.知道单摆做简谐运动时具有固定周期(频率); 3.知道单摆的周期跟什么因素有关,了解单摆的周期公式,并能用来进行有关的计算; 4.知道探究单摆的振动周期时采用的科学探究方法。 二、过程与方法 1. 通过单摆的教学,知道单摆是一种理想化的系统,学会用理想化的方法建立物理模型. 2.猜想单摆的固定周期跟那些因素有关,进一步认识到有根据的、合理的猜想与假设是物理学的 研究方法之一。 3.通过探究单摆的周期,使学生领悟用“控制变量”来研究物理问题的方法,学习设计 实验步骤,提高学生根据实验数据归纳物理规律的能力。 三、情感态度与价值观 1.在实验探究的过程中,培养兴趣和求知欲,体验战胜困难、解决物理问题时的喜悦; 2.养成实事求是、尊重自然规律的科学态度,知道采用科学方法解决问题,而不是乱猜、盲从。 【教学重点、难点】 重点: 1. 了解单摆的构成。 2.单摆的周期公式。 3.知道单摆的回复力的形成。 难点: 1.单摆振动的周期与什么有关。 2.单摆振动的回复力是由什么力提供的,单摆做简谐运动的条件。 【教学用具】 教师演示实验:多媒体投影仪、铁架台、沙子、单摆、秒表、米尺、磁铁 学生分组实验:游标卡尺,铁架台,铁夹,细线,秒表,米尺,磁铁,一组质量不同的带小 孔的金属小球
【教材分析和教学建议】 教学方法: 1.关于单摆的构成的教学——采用问题教学法. 电教法和讲授法进行 . 2.关于单摆周期的教学——采用猜想、实验验证、分析推理、归纳总结的方法进行. 3.关于单摆的振动 . 单摆做简谐振动的条件及单摆回复力的教学——采用分析归纳法、 电化教学法、讲授法、推理法进行 . 4. 关于单摆在摆角很小时做简谐运动的证明——采用数学公式推导法进行. 教材分析: 1.课标要求:通过观察与分析,理解谐运动的特征,能用公式和图像描述 谐 运动的特征 2.本节主要定性研究单摆作简谐运动的周期和那些因素有关,最后给出定量的公式。首先,教师 应当实际生活使用的各种各样的摆抽象出单摆,例如挂钟,秋千等通过对单摆的受力分析,使学生掌握单摆作谐运动的条件。通过观察和猜想,估计单摆的振动周期和那些因素有关,并且通过设计实验验证自己的猜想。主要分三步:⑴从实际的摆中抽象出单摆,⑵探究单摆运动周期,⑶研究单摆作谐运动的条件。 【教学过程】 一.创设情境,引入新课 在日常生活中,我们经常可以看到悬挂起来的物体在竖直平面内摆动,如摆钟、秋千,等等。生活中的这些摆动都属于振动。如果悬挂小球的细线的伸缩和质量可以忽略,线长又比球的直径大得多,这样的装置叫单摆. 为什么对单摆有上述限制和要求呢?①线的伸缩和质量可以忽略, 就使质量全部集中在摆 球上 .②线长比球的直径大得多,就可把摆球当作一个质点,只有质量无大小,悬线的长度 就是摆长。这样,单摆就抽象成一种物理模型,便于我们研究它们振动的情况。 二、进行科学探究 1.提出问题 弹簧振子做简谐运动时具有固有周期,做简谐运动的单摆是否也有固有周期呢? 2.猜想或假设 弹簧振子做简谐运动的固有周期取决于振子本身的质量和弹簧的劲度系数,与振幅等外 界条件无关。即固有周期仅仅取决于弹簧振子的组成系统。那么,做简谐运动的单摆的固有 周期又取决于哪些因素呢? 引导学生可从单摆的结构思考:单摆振动的周期可能与振幅、摆球质量、摆长、当地的 重力加速度及空气阻力有关,也可能与摆线的质地、小球的密度、体积有关
基于Solid Edge的高级机构运动仿真
基于Solid Edge的高级机构运动仿真 在机构设计中,分析输入/输出构件运动的相关性是比较困难和繁琐的,但若能方便地得到输入/输出构件及相关中间构件的运动曲线,解决这类问题就会容易许多。 Solid Edge 具有功能强大的三维造型模块和装配模块,而Dynamic Designer/Motion for Solid Edge实现了Dynamic Desinger和Solid Edge的无缝集成,用户不必离开自己所熟悉的Solid Edge界面,就可以对所设计的装配体进行运动仿真。 Dynamic Designer产品由Simply Motion、Motion和Professional组成,用户可以根据设计的复杂程度进行选择,也可以根据实际应用的情况逐步升级到更高一级的产品。在机构设计中,熟练使用以上模块,完成零件的三维实体造型,模拟整个机构的装配,分析装配干涉情况,进而实现运动模拟、运动干涉分析和动力分析,即可实现机构的精确设计,优化机器的性能和可靠性,从而减少从设计到产品的开发周期。 本文以单、双万向联轴结机构为例,简述了运用以上模块进行机构的装配、运动模拟及运动分析、动力分析的过程。 一、单万向联轴结机构的运动分析 图1是应用Solid Edge的Part模块制作的十字结、叉轴和支架。在支架的制作中要注意精确定位左右轴孔的位置及角度,以便准确安装。 图1 十字结、叉轴和支架的实体造型 图2为装配后的单万向联轴结,装配中左右叉轴与支架、十字结的定位关系均为轴对齐、面对齐。
图2 装配后的单万向联轴结 如果让右侧叉轴作为输入轴并以60r/min匀速旋转,左侧叉轴作为输出轴,由于其输出转速是变速的,在Solid Edge集成的Simply Motion模块中无法对该输出轴进行速度和加速度分析。应用Dynamic Designer/Motion for Solid Edge,在Edge Bar中选中左侧叉轴,单击鼠标右键,选“绘制曲线”→“角速度”→“幅值”,如图3所示;重复上述操作,在Edge Bar中选中左侧叉轴,单击鼠标右键,选“绘制曲线”→“角加速度”→“幅值”,图4为将会出现在操作区中的输出叉轴的角速度和角加速度曲线。 图3 绘制输出曲线的操作
基于MATLAB的单摆运动概要
Matlab仿真技术作品报告 题目:MATLAB在单摆实验中的应用 系(院): 专业: 班级: 学号: 姓名: 指导教师: 学年学期:2012~2013 学年第 1 学期 2012年11月18日
设计任务书 摘要 借助MATLAB 计算软件, 研究无阻尼状态下单摆的大摆角运动, 给出了任意摆角下单摆运动周期的精确解。同时利用MATLAB 函数库中的ode45 函数, 求解出大摆角下的单摆的运动方程。并利用其仿真动画形象的展现出单摆的运动规律, 为单摆实验中大摆角问题的讲解提供了较好的教学辅助手段。 关键词单摆模型;周期;MATLAB;
目录 一、问题的提出 (2) 二、方法概述 (2) 2.1问题描述 (2) 2.2算法基础 (3) 2.2.1单摆运动周期 (3) 2.2.2单摆做简谐运动的条件 (4) 三、基于MAT LAB的问题求解 (5) 3.1单摆大摆角的周期精确解 (5) 3.2、单摆仿真(动画) (7) 3.3单摆仿真整个界面如下: (10) 四、结论 (12) 五、课程体会 (12) 参考文献 (13)
一、问题的提出 在工科物理教学中,物理实验极其重要,它担负着训练学生基本实验技能、验证学生所学知识、提高学生综合实力的重要职责。通过一系列的物理实验,学生可在一定程度上了解并掌握前人对一些典型物理量的经典测量方法和实验技术,并为以后的实验工作提供有价值的借鉴,进而培养学生的动手实践能力和综合创新能力。然而,物理实验的优劣很大程度受限于物理实验条件的制约。当前,受限于以下条件(很多情况下物理实验环境都是难以有效构造的),物理实验的效果并不理想: 1)一些实验设备比较复杂并且昂贵,难以普及应用; 2)有效实验环要求非常苛刻,是现实环境中难以模拟,甚至根本无法模拟; 3)除此以外,有些实验的实验环境即使可以有效构造,它的实验结果却仍然是难以直接、完整观察获取的,如力场、电场、磁场中的分布问题等。 鉴于以上原因,物理仿真实验已引起了大家的关注,出现了一些软件。但很多是基于Flash、Photoshop 、3D Studio MAX之类的图形图像软件制作。这些软件可以制作逼真的实验环境和生动的实验过程动画,还可以制作出实际实验所无法达到的效果。但这类软件本身是制作卡通动画的,对物理实验规律和过程很少涉及,很难做到真正的交互使用,及精确的计算分析同时开发也很困难。因此,基于这些软件的仿真在工科物理实验教学中应用很少。本文利用MATLAB 计算软件及其仿真功能对单摆实验过程进行模拟、仿真及后期分析,对物理实验教学改革提供一种新思路。 具体地,本文将描述一种新颖的单摆实验方法, 其主要的意义在于给学生以综合性实验技能训练。一个综合性实验, 它必须涉及多方面的知识和实验技能。本文描述的单摆实验方法即具备这样的特征。它的实验原理虽然简单, 但所涉及到的知识点极为丰富: 力学振动, 计算机编程等。学生通过这样的实验不仅可以得到综合性的实验技能训练, 而且可以在如何将现代技术改造传统实验、理论联系实际等方面得到很多启示。另外,本文引入计算机技术分析法, 对单摆实验进行了改造, 既实现了基础物理实验的现代化, 又为MATLAB课程实验提供了很好的应用落足点, 可以使学生得到多方面的实验技能训练。 二、方法概述 2.1问题描述 单摆问题是高中物理及大学普通物理实验教学中的一个基础问题。单摆在摆角
高中物理-单摆教案 (3)
高中物理-单摆教案 【教学目标】 一、知识与技能 1.知道单摆是一种理想化模型和做简谐运动的条件 2. 知道单摆做简谐运动时回复力的特点和表达式 3.知道单摆(偏角θ较小时)的周期与振幅、摆球质量、摆长和当地重力加速度g的关系。 二、过程与方法 1.知道测量单摆周期的方法,会用单摆测定重力加速度 2.通过探究过程体会猜想、设计实验、分析论证、评估等科学探究要素; 3.通过制定探究方案体会“控制变量”的研究方法。 三、情感、态度和价值观 1.通过实验,领悟实事求是的理念,并在探究活动中培养合作精神。 2.通过动手合作调动学生的学习主动性,培养他们的探究意识,激发他们的学习热情,体会研究的乐趣。 【重点、难点、疑点】 1.重点:单摆的振动规律和周期公式。 2.难点:单摆回复力的分析。 3.疑点:怎样确定单摆的振动周期与哪些因素有关,以及具体关系。 【教具准备】 摆球、铁架台、细线、支架、盛砂漏斗、硬纸板、砂、计算机、投影仪等 【教学过程】 一、复习引入新课 在前面我们学习了弹簧振子,知道弹簧振子做简谐运动。 那么:怎么判断物体的运动是否是简谐运动 答:有两种方法:方法一:位移时间图像为正弦 函数 方法二:物体在跟位移大小成正比、并且总是指 向平衡位置的回复力作用下的振动F =-kx 在生活中有很多种机械振动。比如建筑物挂钟的 振动、房顶吊灯的摆动、秋千的运动、座钟的钟 摆的摆动。这些运动都是摆动。我们对实际生活 中的摆进行理想化处理,忽略次要因素、突出主 要因素,这样所构建的模型称之为单摆。
二、新课教学 (一)单摆 问题:以上这些运动有什么共同点? 物理中常抽象出一种模型 1、单摆概念:细线一端固定在悬点,另一端系一个小球,如果 细线的质量与小球相比可以忽略;球的直径与线的长度相比也 可以忽略,这样的装置就叫做单摆。 ①摆线质量m 远小于摆球质量 M,即m << M ②摆球的直径 d 远小于单摆的摆长L,即 d <<L。③摆球所受空气阻力远小 于摆球重力及绳的拉力,可忽略不计。④摆线的伸长量很小, 可以忽略。 2、摆长:悬点到摆球重心的距离。摆长 L=L0+R (二)单摆的运动 问题1:运动的平衡位置在哪里 细线竖直下垂,摆球所受重力G和悬线的拉力F平衡,O点就是摆球的平衡位置。问题2:摆球的受力情况小球收到的力有重力、拉力 问题3:小球的运动情况分析以点O为平衡位置的振动 以悬点O’为圆心的圆周运动 问题4:力与运动的关系 回复力大小:向心力大小: O` O θ sin mg F= 回 θ cos mg N F- = 向
机构运动仿真基本知识
机构仿真是PROE的功能模块之一。PROE能做的仿真内容还算比较好,不过用好的兄弟不多。当然真正专做仿真分析的兄弟,估计都用Ansys去了。但是,Ansys研究起来可比PROE麻烦多了。所以,学会PROE的仿真,在很多时候还是有用的。我再发一份学习笔记,并整理一下,当个基础教程吧。希望能对学习 仿真的兄弟有所帮助。 术语 创建机构前,应熟悉下列术语在PROE中的定义:主体(Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。 连接(Connections) - 定义并约束相对运动的主体之间的关系。 自由度(Degrees of Freedom) - 允许的机械系统运动。连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。 拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。 动态(Dynamics) - 研究机构在受力后的运动。 执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。 齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。 基础(Ground) - 不移动的主体。其它主体相对于基础运动。 机构(Joints) - 特定的连接类型(例如销钉机构、滑块机构和球机构)。 运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。 环连接(Loop Connection) - 添加到运动环中的最后一个连接。 运动(Motion) - 主体受电动机或负荷作用时的移动方式。 放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动 的图元。 回放(Playback) - 记录并重放分析运行的结果。 伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。可在机构或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。LCS - 与主体相关的局部坐标系。LCS 是与主体中定义的第一个零件相关的缺 省坐标系。 UCS - 用户坐标系。 WCS - 全局坐标系。组件的全局坐标系,它包括用于组件及该组件内所有主体 的全局坐标系。 运动分析的定义 在满足伺服电动机轮廓和机构连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,模拟机构的运动。运动分析不考虑受力,它模拟除质量和力之外的运动的所有方面。因此,运动分析不能使用执行电动机,也不必为机构指定质量属性。运动分析忽略模型中的所有动态图元,如弹簧、阻尼器、重力、力/力矩以及执行电动机等,所有动态图元都不影响运动分析结果。
单摆运动规律的研究培训资料
单摆运动规律的研究 摘要单摆问题是高中物理及大学普通物理实验教学中的一个基础问题。受各种因素的影响,其运动规律较为复杂。本文建立了理想模式下单摆的数学模型,现实情况下单摆的数学模型.等对单摆的运动进行了探究。 首先,本文从理想情况出发,由牛顿第二定律进行推理,建立了无阻尼小角度单摆运动模型,对单摆的运动进行了初步探究。 然后,本文又建立了无阻尼大角度单摆运动模型,进一步完善了理想模式下单摆的数学模型。 最后,本文从实际出发,考虑单摆运动中受到的阻力因素,以理想模式下单摆的数学模型为基础,建立了现实情况下单摆的运动模型,深度的对单摆运动进 行了探索。 关键词简谐运动角度阻尼运动单摆运动 目录 一、问题的描述 二、模型假设 三、模型建立及求解 1 理想模式下单摆的数学模型 1.1 小角度单摆运动模型 1.1.1 模型建立 1.1.2 模型求解 1.1.3 结果分析 1.2 大角度单摆运动模型 1.2.1 模型建立 1.2.2 模型求解 1.2.3 结果分析 2 现实模式下单摆的数学模型 2.1 小、大阻尼单摆运动模型 2.1.1 模型建立 2.1.2 模型求解 2.1.3 结果分析 四模型分析 问题的描述 根据平常接触到的摆钟、秋千等实物中,我们可以抽象出单摆的模型。细线一端固定在悬点,另一端系一个小球,如果细线的质量与小球相比可以忽略,球的直接与线的长度相比也可以忽略,这样的装置就叫做单摆.我们从理想情况出发进行分析,并逐渐完善从而推导出单摆实际运动规律。 二模型假设
1悬挂小球的细线伸缩和质量均忽略不记,线长比小球的直径大得多; 2. 装置严格水平; 3. 无驱动力。 三模型建立及求解 1理想模式下单摆的数学模型 mg 图1简单单摆模型 在t时刻,摆锤所受切向力ft(t)是重力mg在其运动圆弧切线方向上的分力,即f(t) =mg si n(t) 完全理想条件下,根据牛顿第二运动定律,切向加速度为: a(t) = g sin (t) 因此得到单摆的运动微分方程组: dv(f) ------- =gain ff (r) + —sin(9 = 0 (1)打I 1.1小角度单摆运动模型1.1.1模型建立 当摆角B很小时,sin B?,B故方程1可简化为: —+-^(9=0 (2) 护I 1.1.2模型求解 利用matlab软件在[0, 5o]分别作出方程(1)和方程(2)的解得图像
探究单摆的物理原理教案
探究单摆的物理原理教案 【教学目标】 (一)知识与技能 1、知道什么是单摆,了解单摆的构成。 2、掌握单摆振动的特点,知道单摆回复力的成因,理解摆角很小时单摆的振动是简谐运动。 3、知道单摆的周期跟什么因素有关,了解单摆的周期公式,并能用来进行有关的计算。 4、知道用单摆可测定重力加速度。 (二)过程与方法 1、知道单摆是一种理想化的系统,学会用理想化的方法建立物理模型。 2、通过单摆做简谐运动条件的教学,体会用近似处理方法来解决物理问题。 3、通过研究单摆的周期,掌握用控制变量的方法来研究物理问题。 (三)情感、态度与价值观 1、单摆在小角度情况下做简谐运动,它既有简谐运动的共性,又有其特殊性,理解共性和个性的关系; 2、当单摆的摆角大小变化时,单摆的振动也将不同,理解量变和质变的变化规律。 3、培养抓住主要因素,忽略次要因素的辨证唯物主义思想。 【教学重点】 1、知道单摆回复力的来源及单摆满足简谐运动的条件; 2、通过定性分析、实验、数据分析得出单摆周期公式。 【教学难点】 1、单摆振动回复力的分析; 2、与单摆振动周期有关的因素。 【教学方法】 分析推理与归纳总结、数学公式推导法、实验验证、讲授法与多媒体教学相结合。
【教学用具】 单摆、秒表、米尺、条形磁铁、装有墨水的注射器(演示振动图象用)、CAI 课件。 【教学过程】 (第一课时)单摆的回复力 (一)引入新课 教师:1862年,18岁的伽利略离开神学院进入比萨大学学习医学,他的心中充满着奇妙的幻想和对自然科学的无穷疑问,一次他在比萨大学忘掉了向上帝祈祷,双眼注视着天花板上悬垂下来摇摆不定的挂灯,右手按着左手的脉搏,口中默默地数着数字,在一般人熟视无睹的现象中,他却第一个明白了挂灯每摆动一次的时间是相等的,于是制作了单摆的模型,潜心研究了单摆的运动规律,给人类奉献了最初的能准确计时的仪器。 在第一节中我们以弹簧振子为模型研究了简谐运动,日常生活中常见到摆钟、摆锤等的振动,这种振动有什么特点呢本节课我们来学习简谐运动的另一典型实例——单摆。 (二)进行新课 1.单摆 (1)什么是单摆 秋千和钟摆等摆动的物体最终都会停下来,是因为有空气阻力存在,我们能不能由秋千和钟摆摆动的共性,忽略空气阻力,抽象出一个简单的物理模型呢 (出示各种摆的模型,帮助学生正确认识什么是单摆) ①第一种摆的悬绳是橡皮筋,伸缩不可忽略,不是单摆; ②第二种摆的悬绳质量不可忽略,不是单摆; ③第三种摆的悬绳长度不是远大于球的直径,不是单摆; ④第四种摆的上端没有固定,也不是单摆; ⑤第五种摆是单摆。 定义:如果悬挂小球的细线的伸缩和质量可以忽略,线长又比球的直径大得多,这样的装置叫单摆。 绳绕在杆上
单摆运动的分析
单摆的运动规律分析 摘要:单摆的理想模型是,假设单摆由不可伸缩的轻绳与一质量为m 的小球组成,不考虑空气阻力。在此基础上还可以进一步考虑受阻力情况。 关键词:单摆 线性微分方程 非线性微分方程 正文: 单摆的理想模型是,假设单摆由不可伸缩的轻绳与一质量为m 的小球组成,不考虑空气阻力。在此基础上还可以进一步考虑受阻力情况。 单摆在摆动过程中要受到空气阻力的影响,且其在摆动的过程中可能会出现不在同一平面内的情况,若考虑这一系列问题,求解就会变得比较复杂了,首先把问题理想化,假设单摆由不可伸缩的轻绳与一质量为m 的小球组成,不考虑空气阻力。 Ⅰ.由刚体绕定轴转动的微分方程可知: θθsin 2 22 mgl dt d ml -=……⑴ 当θ很小时: 02 2=+θθl g dt d ……⑵ 令l g w =2 则原式化为02 22=+θθw dt d ……⑶ 做任意角度摆动时的情况: 0sin 2 2 2=+θθw dt d ……⑷ Ⅱ.受大小与速度成正比的阻力作用时: 0sin 2 22=+-θθθw dt d k dt d ……⑸ 做小角度摆动时可近似为: 0222=++θθ θw dt d k dt d ……⑹ 其中⑵、⑶、⑹式为线性微分方程,⑴、⑷、⑸式为非线性微分方程。 1)小角度震荡时将sin θ近似看作θ i.函数文件: function fc=f0(t,y) global g l fc=[y(2) -g/l*y(1)]' ii.绘图程序:
clear clc global g l g=9.8; l=1; w0=input('wm0?\n') [t,y]=ode45('f0',[0,100],[0,w0*pi]'); plot(t,y(:,1),'r') title('θ-t 图'); xlabel('时间/s'); ylabel('θ/rad'); grid iii.图像: 取wm0=0.5. 2)振幅增大后,θ将不满足近似条件。 i.函数文件: function fc=f1(t,y) global g l fc=[y(2) -g/l*sin(y(1))]' ii.绘图程序: clear clc global g l k
2020高中物理必备知识点 单摆
单摆 同学们:前面几节课,我们与弹簧振子为载体详细研究了简谐运动的运动特征和简谐运动的图像。在众多的机械振动中是不是只有弹簧振子的运动是简谐运动呢?当然不是。今天我们再来研究加一个典型的简谐运动――单摆。 (板书课题:四、单摆) 我们先来看看摆动:(演示多媒体课件)其实摆动还是比较复杂的,我们先研究最简单的摆动――单摆。 什么是单摆呢? (板书:一、单摆的构成) 一根没有质量的细线,下挂一个质点构成理想的单摆――理想化物理模型 实际中是一根质量、伸缩可以忽略不计的细线下挂一个密度较大的金属小球构成单摆。通常,如果线很细,伸缩和质量可忽略,球直径比线长短的多,这样的装置就叫做单摆。 单摆的运动特征是来回往复运动,一定有一个回复力,那么单摆的回复力是什么力提供?回复力有何特征呢? (板书:二、单摆的回复力) 边演示多媒体课件,边分析单摆的回复力得出:(板书)θsin mg F =回 (板书)小角度摆动时: ι ιθθθx s tg ≈≈≈弧度)=(sin 所以单摆在较小偏角摆动时: x mg F ι =- 回,对照简谐运动的回复力 特征得:
(板书:三、单摆在较小偏角摆动时是简谐运动) 关于单摆在小角度摆动是简谐运动,还可以从单摆振动图像中得到证实。(演示多媒体课件:砂摆动运动描绘振动图像) 既然单摆是简谐运动,那么它应该有简谐运动的特征量:周期T ,频率f ,振幅A 等。 我们研究一下单摆的周期 (板书:四、单摆的周期) (演示多媒体课件比较研究单摆周期与振幅A 、质量m 、摆长L 、重力加速度g 的关系。) 首先定性研究一下单摆的周期与哪些因素有关。测量摆长约为1m 的单摆,在两个不同振幅下的周期。 怎样测才能误差小呢? 答:测多次,而后取其平均值。为了节省时间,我只测10个全振动时间 保证小角度情况下,改变幅度,读表从平衡位置计时。 结果:单摆周期与振幅无关。 ⑴单摆周期与振幅无关(单摆的等时性) 下面我们再做实验看周期T 与摆球质量之间系。如图,m 1 单摆模型 模型特点:单摆模型指符合单摆规律的模型,需满足以下三个条件: (1)圆弧运动; (2)小角度往复运动; (3)回复力满足F =-kx . 典例 如图1所示,ACB 为光滑弧形槽,弧形槽半径为R ,C 为弧形槽最低点,R ?AB .甲球从弧形槽的球心处自由下落,乙球从A 点由静止释放,问: 图1 (1)两球第1次到达C 点的时间之比; (2)若在圆弧的最低点C 的正上方h 处由静止释放小球甲,让其自由下落,同时将乙球从圆弧左侧由静止释放,欲使甲、乙两球在圆弧最低点C 处相遇,则甲球下落的高度h 是多少? 答案 (1)22π (2)(2n +1)2π2R 8 (n =0,1,2…) 解析 (1)甲球做自由落体运动 R =12gt 21,所以t 1= 2R g 乙球沿圆弧做简谐运动(由于AC ?R ,可认为摆角θ<5°).此运动与一个摆长为R 的单摆运动模型相同,故此等效摆长为R ,因此乙球第1次到达C 处的时间为 t 2=14T =14×2πR g =π2R g , 所以t 1∶t 2=22π . (2)甲球从离弧形槽最低点h 高处自由下落,到达C 点的时间为t 甲= 2h g 由于乙球运动的周期性,所以乙球到达C 点的时间为 t 乙=T 4+n T 2=π2R g (2n +1) (n =0,1,2,…) 由于甲、乙在C 点相遇,故t 甲=t 乙 联立解得h =(2n +1)2π2R 8 (n =0,1,2…). 1.解决该类问题的思路:首先确认符合单摆模型的条件,即小球沿光滑圆弧运动,小球受重力、轨道支持力(此支持力类似单摆中的摆线拉力);然后寻找等效摆长l 及等效加速度g ;最后利用公式T =2πl g 或简谐运动规律分析求解问题. 2.易错提醒:单摆模型做简谐运动时具有往复性,解题时要审清题意,防止漏解或多解. 单摆周期公式及影响单摆周期的因素研究 摘要:结合理论知识,基础物理实验,构建线性数学模型。对单摆运动进行分析。其中,理论部分主要依据高等数学及数学物理方法的知识,对单摆运动周期公式进行论证;实验部分主要通过改变单摆摆线长度进行实验;观察、分析单摆运动规律。从而验证单摆周期公式。并对影响单摆周期的因素展开研究。最后总结出影响单摆周期的因素。 关键词:数学模型;单摆运动;周期公式 单摆运动问题是一个古老的问题,无论是中学物理还是大学物理,我们都在学习研究单摆。作为一个重要的理想物理模型,单摆的运动周期规律和实验研究在生产生活中意义重大。单摆问题是物理学中经典问题。从阅读物理学史并可知道,早在1583 年,十九岁的伽利略(1564—1642)在比萨教堂祈祷时注意到因被风吹而摆动的大灯,他利用自己的脉搏来测定大灯的摆动周期,发现了摆的等时性。但现在这个故事的真实性受到怀疑,因为比萨大教堂所保留的许多相关历史文献都表明该吊灯是在伽利略二十三岁那年才首次安装的。专家指出,伽利略是于1602 年注意到单摆运动的等时性,不过伽利略误认为在大摆动条件下等时性也成立,他说:“物体从直立圆环上任一点落到最低位置的时间相同。”随后吉多彼得做实验发现这个结论与实验不符,伽利略解释说可能是由于摩擦力。伽利略从实验中得出单摆周期与摆长的平方根成正比。他还指出周期与摆球质量无关。他说:“因此我取两个球,一个是铅的而另一个是软木的,前者比后者重100 多倍,用两根等长细线把它们悬挂起来、把每一个球从铅直位置拉到旁边,我在同一时刻放开它们,它们就沿着以这些等长线为半径的圆周下落,穿过铅垂位置,并且沿同一路径返回。”最早系统地研究单摆的是惠根斯(ChristiaanH uygens)。由于当时实验技术条件的落后,重力加速度在惠根斯之前是很难精确测出来的,所以惠更斯不可能从实验中总结出或猜出单摆周期公式的系数π2。事实上,反过来重力加速度是1659 年惠更斯根据单摆周期公式首次精确测出来的。他在巴黎用一个周惠更斯期为2s的单摆(即秒摆),测出摆长为 3.0565英尺,从而计算出2 /2.9s g=。惠更斯于1657 年取得了关于摆钟的专利权。惠更斯最伟大的著作《摆式时钟或用于时钟上的摆的运动的几何证明》于1673 年在巴黎问世。这本书共分5部分,第一与或第五部分讨论时钟,第二部分讨论质点在重力作用下的自由落体运动以及沿光滑平面或曲面所作的约束运动,并证明了在大摆动下约束在旋轮线上的物体等时降落的性质,第三部分建立渐屈线理论,第四部分解决了复摆问题。这是人类第一次系统地研究约束运动的论著。1659 年,在对单摆的研究中,他导出了摆动周期和沿着摆的长从静止开始的自由落体时间之间 常用机构的运动仿真 一名资深机构设计师的话: 机构设计是机械设计中的灵魂,一种独特、新颖的机构设计体现了设计者的智慧与创新的精神。谁掌握、了解的机构越多,在研发设计新产品时就越主动,越有办法。 但是,熟练的掌握各种机构的设计并非易事,并非一日之功。它又是一种“隐性知识”,不是刚刚毕业就可以掌握的知识。需要日积月累,不断从实践、生活中学习,结合理论不断的总结,才能逐步地掌握。 但对于那些刚刚从事机械设计的人,才走上机械设计岗位的人,是否有一条稍微快捷的办法呢?我想尝试下面所述的方法:利用三维软件的运动仿真技术,把在实践中用到的、见到的以及在书本上学到的,常用的机构,绘制成三维模型仿真运动,让那些枯燥的平面图形变成实物一样的机构模型,并让他“动”起来,像看动画片一样。轻松地、在较短的时间里了解各种机构的运动原理,并大大地加深印象和记忆,用这样的办法来“缩短”掌握机构的时间。在老师的帮助下,首先完成了下面几个常用机构的仿真运动并作了简单的说明,方法是否可行?等候读者的消息。 20个常用机构的运动仿真案例 1、风扇摇头机构 图1是风扇摇头机构的原理模型。该机构把电机的转动转变成扇叶的摆动。红色的曲柄与蜗轮固接,蓝色杆为机架,绿色的连架杆与蜗杆(电机轴)固接。电机带扇叶转动,蜗杆驱动蜗轮旋转,蜗轮带动曲柄作平面运动,而完成风扇的摇头(摆动)运动。机构中使用了蜗轮蜗杆传动,目的是降低扇叶的摆动速度、模拟自然风。 图 1 风扇摇头机构 2、用摆动扇形齿轮实现间接送料机构 图2 是一个曲柄摇杆机构。绿色的可调曲柄可作整周旋转。并驱动扇形齿轮(摇杆)摆动,扇形齿轮又使蓝色小齿轮正反转动,若小齿轮与电磁离合器或超越离合器结合可完成间歇转动,可完成间断送料。 图 2 摆动扇形齿轮机构 < MATLAB在单摆实验中的应用 【摘要】借助MATLAB 计算软件, 研究无阻尼状态下单摆的大摆角运动, 给出了任意摆角下单摆运动周期的精确解。同时利用MATLAB 函数库中的ode45 函数, 求解出大摆角下的单摆的运动方程。并利用其仿真动画形象的展现出单摆的运动规律, 为单摆实验中大摆角问题的讲解提供了较好的教学辅助手段。 【关键字】单摆模型;周期;MATLAB 一、问题的提出 在工科物理教学中,物理实验极其重要,它担负着训练学生基本实验技能、验证学生所学知识、提高学生综合实力的重要职责。通过一系列的物理实验,学生可在一定程度上了解并掌握前人对一些典型物理量的经典测量方法和实验技术,并为以后的实验工作提供有价值的借鉴,进而培养学生的动手实践能力和综合创新能力。然而,物理实验的优劣很大程度受限于物理实验条件的制约。当前,受限于以下条件(很多情况下物理实验环境都是难以有效构造的),物理实验的效果并不理想:1)一些实验设备比较复杂并且昂贵,难以普及应用;2)有效实验环要求非常苛刻,是现实环境中难以模拟,甚至根本无法模拟;3)除此以外,有些实验的实验环境即使可以有效构造,它的实验结果却仍然是难以直接、完整观察获取的,如力场、电场、磁场中的分布问题等。鉴于以上原因,物理仿真实验已引起了大家的关注,出现了一些软件。但很多是基于Flash、Photoshop 、3D Studio MAX之类的图形图像软件制作。这些软件可以制作逼真的实验环境和生动的实验过程动画,还可以制作出实际实验所无法达到的效果。但这类软件本身是制作卡通动画的,对物理实验规律和过程很少涉及,很难做到真正的交互使用,及精确的计算分析同时开发也很困难。因此,基于这些软件的仿真在工科物理实验教学中应用很少。本文利用MATLAB 计算软件及其仿真功能对单摆实验过程进行模拟、仿真及后期分析,对物理实验教学改革提供一种新思路。 具体地,本文将描述一种新颖的单摆实验方法, 其主要的意义在于给学生以综合性实验技能训练。一个综合性实验, 它必须涉及多方面的知识和实验技能。本文描述的单摆实验方法即具备这样的特征。它的实验原理虽然简单, 但所涉及到的知识点极为丰富: 力学振动, 计算机编程等。学生通过这样的实验不仅可以得到综合性的实验技能训练, 而且可以在如何将现代技术改造传统实验、理论联系实际等方面得到很多启示。另外,本文引入计算机技术分析法, 对单摆实验进行了改造, 既实现了基础物理实验的现代化, 又为MATLAB课程实验提供了很好的应用落足点, 可以使学生得到多方面的实验技能训练。 二、方法概述 2.1问题描述 单摆问题是高中物理及大学普通物理实验教学中的一个基础问题。单摆在摆角比较小时,其运动规律近似为准简谐振动。但是当摆角比较大时, 即单摆在大摆角情况下运动时,这种近似已不再成立,其运动方程满足非线性微分方程。因此,对摆角大小的限制成为该实验中必须满足的条件。不同的实验条件下,最大摆角的取值不同,其中包括, ,,,甚至等。这就为在实验过程中对摆角的统一取值造成困难,给实验带来较大的误差。同时,学生对单摆在大摆角情况下运动时其运动周期及运动规律的理解也存在困难。利用先进的计算机仿真 单摆的复杂运动 摘要:采用相图方法和庞加莱截面法描述单摆的复杂运动,研究单摆运动中的分岔,混沌等非线性特征。 关键词:单摆;混沌;相图;庞加莱映射 正文: 物理学家伽利略观察比萨大教堂吊灯的摆动,发现了单摆定律:摆动的周期与摆幅无关。 惠更斯利用摆的“等时性”发现了钟表,直至电子表出现前,摆始终是计时装置的心脏,均匀韵律的象征。在高中,大学的物理教材中没有不讲单摆定律的,在物理实验中,没有不做单摆实验的。 单摆是物理学中最简单的模型之一,传统力学教材一般只讨论单摆在摆幅很小的条件下作简谐振动,阻尼振动和受迫振动的特征。事实上,如果不限制其摆幅,单摆在周期性策动力的作用下,其运动将有意想不到的复杂性,本文将从单摆的动力学方程出发,采用相图,牌庞加莱截面等描述方法研究单摆的复杂运动。 1.单摆模型的动力学方程 我们把传统的单摆模型一般化:单摆的摆线换成质量可忽略不计的刚性杆,摆角θ的取值范围不受限制,设摆长为L ,摆球的质量为m ,沿切向受阻力yl θ? -(y 为阻尼系数),重力的分力sin mg θ-以及周期策动力cos F t ω作用,由牛顿第二定律得此单摆所满足的动力学方程为 sin cos ml rl mg F t θθθω????=--+ (1) 为使(1)式各物理量无量纲化,作如下标度变换: 令20/g l ω=,wt τ=,0/ωωΩ=,02Y m βω=,20F F f ml mg ω==,则(1)式变为: 222sin cos d d f d d θθβθπττ=--+Ω (2) 引入新变量ω,?,将(2)式化成自治方程形式 : 2sin cos f θω θβωθ?? ?==--+ (3) 这是一个反映单摆运动所遵循的动力学规律的不显含时间的微分方程组。(3)式中有3个可调参量;β,f 和Ω,每个变量的改变都会引起解的变化。可以通过控制Ω,β,f 参量的变化,从而得出反映系统运动特征的信息。 2 单摆运动的相图及庞加莱截面描述方法 由于(3)式含有非线性项。一般而言,不能用解析法求解,对于这类微分方程,法国数学家庞加莱在十九世纪末创建了一种微分方程的定性理论,发明了相图和拓扑学方法,在不求出解的情况下,通过直接考察微分方程的系数及其本身的结构去研究它的解的性质。相 单摆在不同摆角下运动的数学模型 报告人:曾云霖 专业学号:微电子92 09053057 关键词:单摆、简谐运动、空气阻力,摆角大小 摘要: 单摆是生活中常见的模型,也是常用的简单模型。物理学中所讨论的单摆是一种理想化的模型,也称数学摆。它由一根不可伸缩的细线(质量不计),一端固定,另一端悬挂一质量为M的小球(视为质点)而构成的振动系统。 对于理想单摆,我们总是尽可能的简化它的一般分析,认为它只受到重力和拉力的作用。因为拉力与小球的运动总是相互垂直的,对小球的运动没什么影响 但生活中的单摆往往是非理想的,非理想单摆还考虑到绳的重力、空气阻力等,且单摆的运动还与单摆的摆角有关,研究单摆在不同摆角下的运动是有现实和理论意义的 模型建立: 考虑在摆角很小的范围内(小于5度),sinθ≈θ 此时受力如图所示: 由牛顿第二定律可知 sin mg m θα=- l αβ= l βω= d d t θ ω= 220mg ml t θθ?+=? 化简可得 220g t l θθ?+=? 这是一个二阶常系数的奇次线性微分方程,设定初值条件: ()00,(0)a θω== 利用高等数学知识可以解得: ()1sin 2cos t c t c t θ=+ 代入初值条件: ()cos t a t θω= g l ω= 结论:理想单摆在小摆角下(小于5度)的运动是简谐运动 周期 22l T g π πω== 问题扩展: 实际生活中的单摆是非理想的,总要收到其它力的作用,如绳的重力,空气阻力等 现在我们忽略绳的重力,考虑在空气阻力环境下单摆的运动。 查阅知识可知:空气粘滞阻力与小球速度成正比,即f kv = 所以单摆的受力方程变换为 sin mg kv m θα+=- d v l l dt θ ω== 化简可得: 220d k d g dt m dt l θθθ++= 可令 2,k g n m l ω==? 222^20d d n dt dt θθωθ++= 当220n ω<时 sin cos a t b t θωω=+ 当220n ω=时 ()t a bt e ωθ=+ 当220n ω>时 12 t t ae be ωωθ=+ 武汉大学物理科学与技术学院 物理实验报告 物理科学与技术学院物基专业2020年4月24 日 实验名称:探究单摆的运动规律 姓名:龙敏年级: 2018级学号: 2018302020201 成绩: 实验报告内容: 一、实验目的五、数据表格 二、主要实验仪器六、数据处理及结果表达 三、实验原理七、实验结果分析 四、实验内容与步骤八、习题 一.实验目的 1:设计并搭建一个理想的单摆,测量重力加速度 2:考虑有可能影响单摆运动的非理想因素 二.主要实验仪器 细绳,小重物 三.实验原理 由牛顿力学,单摆的运动可作如下描述。 首先我们可以得到,重力对单摆的力矩为 其中m为质量,g是重力加速度,l是摆长,θ是单摆与竖直方向的夹角,注意,θ是矢量,这里取它在正方向上的投影。 我们希望得到摆角θ的关于时间的函数,来描述单摆运动。由角动量定理我们知道, 其中I是单摆的转动惯量,β是角加速度。 于是化简得到 小角度近似 不过,在θ比较小时,近似地有sin θ ≈ θ,得到这个方程的解析解为 四.实验内容与步骤 1. 将重物系上细绳得到一个单摆 2 将重物拉到一个固定的小角度,使单摆做小角度摆动 3.用手机计时器测量单摆50个周期所经过的时间,重复三次, 4.改变绳长,重复上述过程 5.利用周期公式计算当地的重力加速度 六.数据处理及结果表达 五、实验数据与处理 摆球直径:d1=2.19cm 1. 用计算法g 及其标准偏差: 给定摆长L=72.39cm 的周期 002.0707.1±=?±T T (s) 05.039.72±=?±l l (cm) (单次测量) ∴ )(78.980707 .139.7214.34422 2 22 s cm T l g =??==π 计算g 的标准偏差: )(1013.9) 14(40001.00003.0) 1(42 2222 s n n T i T -?=-?+++= -?= ∑δ 3242221028.1)707 .11013.9(4)39.7205.0()(2)(--?=??+=+?=T l l g T g δδ )(26.178.9801028.123s cm g =??=-δ 结果 )(02.081.92 s m g g ±=±δ 2. 根据不同摆长测得相应摆动周期数据 不同摆长对应的周期 基于Matlab的机构运动仿真方法及其比较 发表时间:2015-12-18T16:19:30.760Z 来源:《基层建设》2015年16期供稿作者:严家炜 [导读] 广东伊之密精密机械股份有限公司运动学仿真对于机构设计研究有着非常重要的地位,它能够去除大量的复杂繁琐和重复的计算工作,对运动过程进行直观的表达。 严家炜 广东伊之密精密机械股份有限公司 528306 摘要:机构运动仿真在机构学研究中占有着非常重要的地位,本文依照仿真活动生命周期,总结概括了三种机构运动仿真方法,并进行对比研究深入分析。基于MatLab平台,以曲柄摆杆机构为例探究这三种方法的实现途径。 关键词:Matlab;机构运动仿真;对比 前言 运动学仿真对于机构设计研究有着非常重要的地位,它能够去除大量的复杂繁琐和重复的计算工作,对运动过程进行直观的表达。在机构运动仿真中,明确不同仿真方法及其特点,把握仿真方法的发展趋势,从而充分选择和利用不同仿真平台的功能,对于节约仿真费用,提高研究效率等方面有积极作用。 1.Matlab概述 Matlab是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分。 2.机构运动仿真 机构仿真周期主要由建立模型,求解模型,展现结果,观察结果和调整模型等五部分构成,如图1所示。建立模型即列出相关构件或关键点的运动方程,通过求解模型解算出相关点的位姿数据,基于这些数据建立直观的人机界面,将运动过程动态展现给用户。通常仿真与优化配合使用,由于人机界面的直观性,通过观察常常可以获得优化方面的新信息,利用优化后的新参数调整仿真模型,开始一个新的仿真活动周期,直到获得满意结果为止。 根据对机构仿真中各阶段的侧重不同,可以将机构运动仿真方法基本归为三个大的类别。第一类的核心是,对仿真模型进行数值求解,称之为基于模型解算的仿真方法。第二类以提供建模支持手段为核心,利用一些辅助工具来提高建模效率,称之为基于辅助建模的仿真方法。第三类方法中引进了虚拟现实技术,称之为基于虚拟现实的仿真方法。以下以图1所示的曲柄摆杆机构为例,说明三种仿真方法的实现过程。该机构的相关参数分别为l1=370,l2=1049.6,l3=524.7,(xd,yd)=(1080.3,-270)。其中AB为曲柄,是原动件,以ω作匀速圆周运动,DC为摆杆。 图1:一个曲柄摆杆机构 3.运动仿真方法 3.1基于模型解算的运动仿真 基于模型解算的运动仿真方法属于传统的仿真方法,它以求解模型为核心,重点研究模型的求解方法,以及如何提高求解的效率。也就是说,仿真效率的提高主要体现为模型求解效率的提高。在MatLab中,具体表现为提供了大量的功能强大的函数,供求解模型时调用。 这种传统的机构仿真方法的另一个特点是,对仿真结果即运动轨迹的展现,除非用户满意字符界面,一般要用户本人利用图形函数绘制相关构件或关键点的轨迹。对于图2所示机构,如果要在基于OpenGL的环境下,以图形方式展现运动轨迹,开发人员必须调用多个GDI 函数。但在MatLab下,对于C点的位姿数据,只要调用plot函数即可获得运动图线。 3.2基于辅助建模的运动仿真 这种方法是以提高建模效率来提高仿真效率的,MatLab/Simulink就是以框图作为建立仿真模型的主要支持手段,框图成为描述模型的基本元素。而且,MatLab还提供了一个机构系统仿真工具SimMechanics,它可以在Simulink环境下直接使用,使得仿真建模更为便捷。 3.3基于虚拟现实的仿真方法 虽然在SimMechanics下也可采用VR的显示方式,问题是由于构件模型不是三维的,不能得到虚拟环境下的效果。尤其是对于空间机构,这种缺陷更为明显。如果能够从不同的空间位置,观察机构的构件基于三维实体模型的动态运动过程,则可以得到更为逼真的仿真效果,这有助于人们对机构的直观理解,对于发现设计缺陷是非常重要的。这可以利用MatLab中的VR工具箱[6]来实现。以虚拟现实的方式展现仿真结果数据时,必须将仿真模型的数据实时传送到虚拟场景中,用仿真模型驱动三维场景。 4.方法比较 4.1模型解算方法 这类方法强调仿真模型的求解,以提高求解仿真模型的效率为核心。主要优点是对软件平台的要求不高,比较灵活,不受制于仿真软件供应商。可以在多个较为通用平台上开发,如选择VisualC++或BorlandC++,可以开发自主知识产权的仿真软件。 这类方法主要缺点是,通用性相对较差,当面临每一个具体机构时,都要开发一个单独的仿真引擎,因此工作量较大。当要以图形方式展现仿真结果时,也必须进行额外的编程工作。这类方法的另外一个缺点是,要求技术人员掌握较多的编程知识和仿真领域的知识,增单摆模型
单摆周期公式及影响单摆周期的因素研究
常用机构的运动仿真(20个例程)
MATLAB在物理中的应用(单摆).doc
单摆的复杂运动
单摆运动的数学建模
探究单摆的运动规律
基于Matlab的机构运动仿真方法及其比较