I2C接口的EEPROM 24C64芯片的驱动方法
I2C接口的EEPROM24C64芯片的驱动方法与93C46类似的,24C64也是EEPROM,但不同的是24C64是I2C接口的,容量也要更大些,用来存储较大容量的数据,甚至在某些单片机中可以用作程序存储器。
24C64提供65536个位,它们是以字节方式进行组织的。通过设置不同的地址,可以实现多达8个芯片共享两线总线。它被广泛应用于工业、化工等需要低功耗与低电压的领域。同时,它还提供诸如4.5V~5.5V、2.7V~5.5V、2.5V~5.5V与1.8V~5.5V各种工作电压范围的芯片,从而使其应用更加通用。
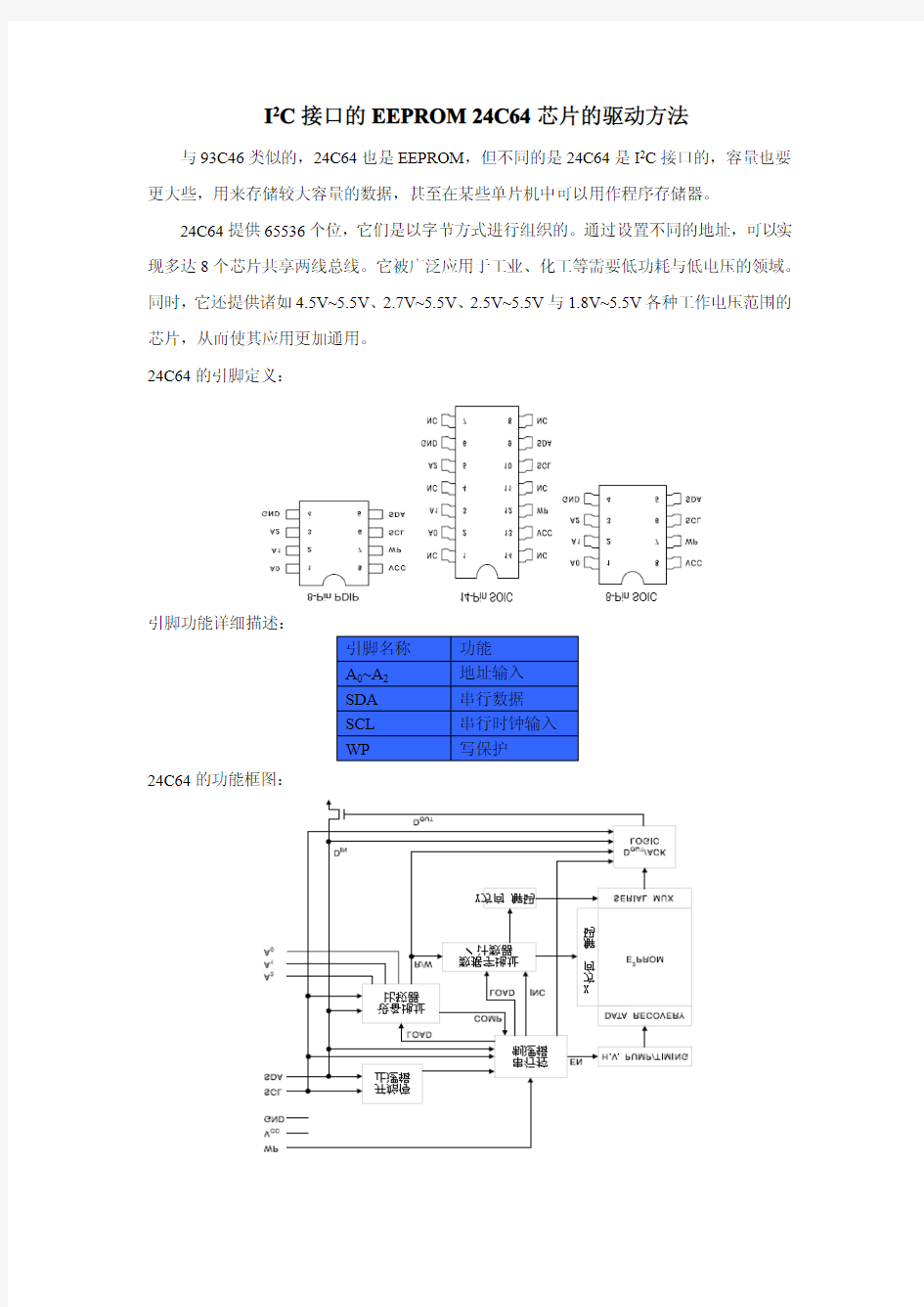
24C64
的引脚定义:引脚功能详细描述:24C64
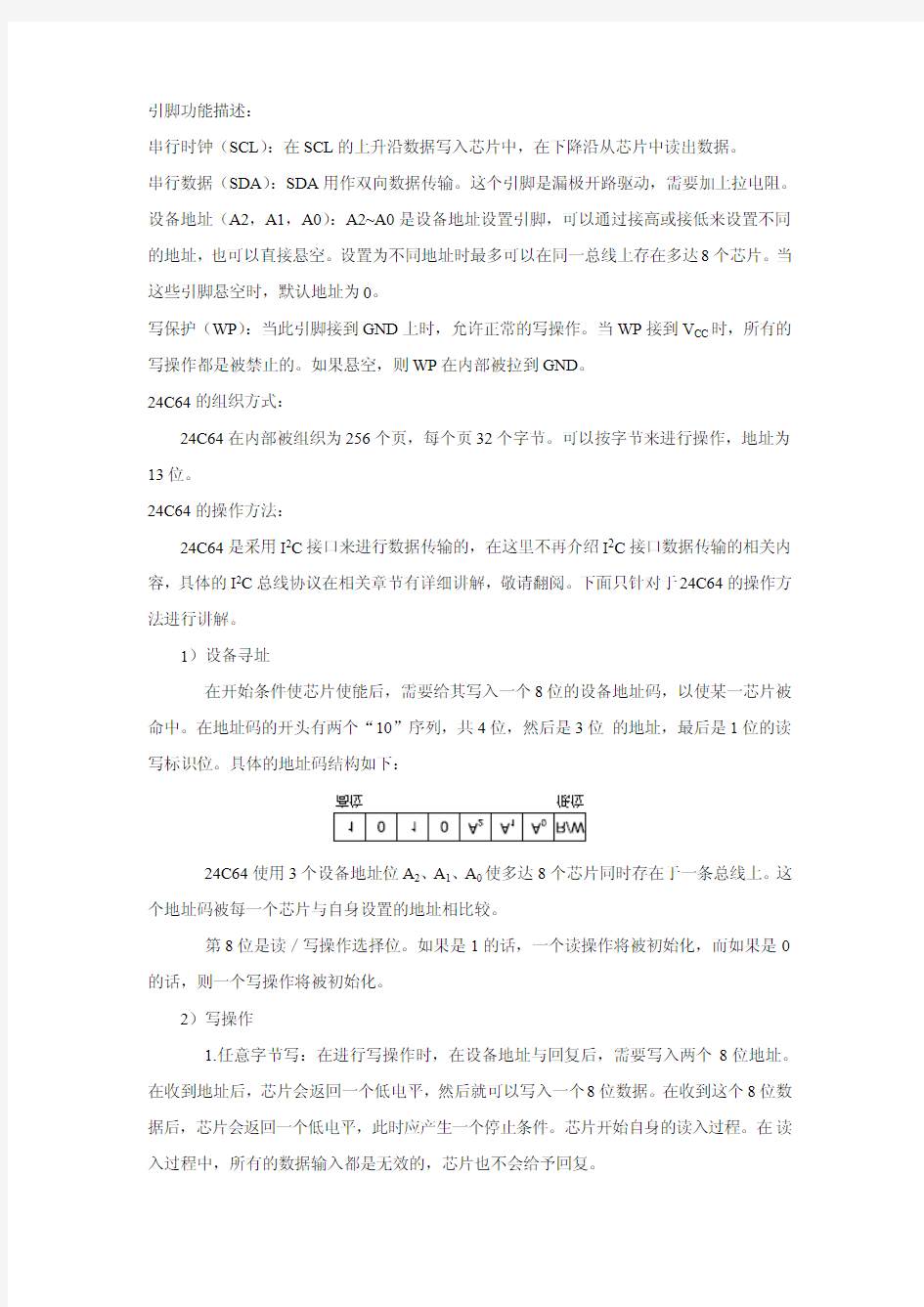
的功能框图:
引脚功能描述:
串行时钟(SCL):在SCL的上升沿数据写入芯片中,在下降沿从芯片中读出数据。
串行数据(SDA):SDA用作双向数据传输。这个引脚是漏极开路驱动,需要加上拉电阻。设备地址(A2,A1,A0):A2~A0是设备地址设置引脚,可以通过接高或接低来设置不同的地址,也可以直接悬空。设置为不同地址时最多可以在同一总线上存在多达8个芯片。当这些引脚悬空时,默认地址为0。
写保护(WP):当此引脚接到GND上时,允许正常的写操作。当WP接到V CC时,所有的写操作都是被禁止的。如果悬空,则WP在内部被拉到GND。
24C64的组织方式:
24C64在内部被组织为256个页,每个页32个字节。可以按字节来进行操作,地址为13位。
24C64的操作方法:
24C64是采用I2C接口来进行数据传输的,在这里不再介绍I2C接口数据传输的相关内容,具体的I2C总线协议在相关章节有详细讲解,敬请翻阅。下面只针对于24C64的操作方法进行讲解。
1)设备寻址
在开始条件使芯片使能后,需要给其写入一个8位的设备地址码,以使某一芯片被命中。在地址码的开头有两个“10”序列,共4位,然后是3位的地址,最后是1位的读写标识位。具体的地址码结构如下:
24C64使用3个设备地址位A2、A1、A0使多达8个芯片同时存在于一条总线上。这个地址码被每一个芯片与自身设置的地址相比较。
第8位是读/写操作选择位。如果是1的话,一个读操作将被初始化,而如果是0的话,则一个写操作将被初始化。
2)写操作
1.任意字节写:在进行写操作时,在设备地址与回复后,需要写入两个8位地址。在收到地址后,芯片会返回一个低电平,然后就可以写入一个8位数据。在收到这个8位数据后,芯片会返回一个低电平,此时应产生一个停止条件。芯片开始自身的读入过程。在读入过程中,所有的数据输入都是无效的,芯片也不会给予回复。
字节写操作的时序图如下:
字节写的程序:
void A T24C64_W(void*mcu_address,unsigned int A T24C64_address,unsigned
int count)
{
while(count--)
{
I2C_Start()?
/*I2C_Send_Byte(0xa0+A T24C64_address/256*2)?*//*24C16USE*/
I2C_Send_Byte(0xa0)?
I2C_Send_Byte(AT24C64_address/256)?
I2C_Send_Byte(AT24C64_address%256)?
I2C_Send_Byte(*(unsigned char*)mcu_address)?
I2C_Stop()?
Delay_N_mS(10)?/*waiting for write cycle to be completed*/
((unsigned char*)mcu_address)++?
A T24C64_address++?
}
}
以上程序通过使用字节写实现数据连续写入。
2.页写:24C64也是支持页写的。
页写的初始化与字节写是相同的,但是在第一个字节被写进去以后并不产生停止条件,而是可以继续写入31个字节。在每一个字节写入后芯片会返回低电平。最后应产生一个停止条件以终止页写操作。
内部数据地址的低5位在每接收一个字节后自增,而高位不会自增,保持该页在存储器中的地址。如果有超过32个字节被写入,则页地址会回滚到页头,覆盖前面的数据。
页写的时序图如下:
页写的程序:
void AT24C64_WP(void*mcu_address,unsigned int A T24C64_address,unsigned
int count)
{
I2C_Start()?
I2C_Send_Byte(0xa0)?
I2C_Send_Byte(AT24C64_address/256)?
I2C_Send_Byte(AT24C64_address%256)?
while(count--)
{
I2C_Send_Byte(*(unsigned char*)mcu_address)?
Delay_N_mS(10)?/*waiting for write cycle to be completed*/
((unsigned char*)mcu_address)++?
}
I2C_Stop()?
}
3)读操作
读操作的初始化与写操作是相同的,唯一不同的是读/写选择位要置为1。读操作有三种:当前地址读、字节读、序列读。
1.当前地址读:
芯片内部地址计数器记录了最后一次读或写操作后的地址(地址自动加1),这个地址只要芯片电源供给正常就一直有效。在读操作中,当地址到达最后一个地址(最后一个页的最后一个字节)后会自动“回滚”到最开始的位置(第一个页的第一个字节)。而在写操作中,“回滚”则是从当前页的最后一个字节转到该页的第一个字节。当选择位置1后的设备地址码写入芯片,并回应后,当前地址上的数据将会串行输出。此时,单片机应产生一
个停止条件。
当前地址读的时序图如下:
当前地址读的程序:
unsigned char A T24C64_RC()
{
unsigned char temp?
I2C_Start()?
I2C_Send_Byte(0xa1)?
temp=I2C_Receive_Byte()?
I2C_Nack()?
I2C_Stop()?
return temp?
}
2.任意字节读:
任意字节读需要写入一个地址。当设备地址码与数据地址码写入芯片并得到了回应后,此时单片机必须再产生一个开始条件,随后的操作就与当前地址读相同了。
任意字节读的时序图如下:
任意字节读的的程序:
void A T24C64_R(void*mcu_address,unsigned int A T24C64_address,unsigned int
count)
{
while(count--)
{
I2C_Start()?
I2C_Send_Byte(0xa0)?
I2C_Send_Byte(AT24C64_address/256)?
I2C_Send_Byte(AT24C64_address%256)?
I2C_Start()?
I2C_Send_Byte(0xa1)?
*(unsigned char*)mcu_address=I2C_Receive_Byte()?
I2C_Nack()?
I2C_Stop()?
((unsigned char*)mcu_address)++?
A T24C64_address++?
}
}
以上程序采用字节读的方式实现从某一地址开始读取count个字节。
3.序列读
序列读的初始化与当前字节读与任意字节读相同。在单片机收到一个字节后,都要产生一个回应。然后内部地址会自增并可以继续输出数据。当地址到达尽头时,它会自动“回滚”,而序列读操作会继续。当单片机不再产生回应而产生停止条件时,序列读操作终止。
序列读的时序图:
序列读的程序:
void AT24C64_RS(void*mcu_address,unsigned int count)
{
I2C_Start()?
I2C_Send_Byte(0xa1)?
counter--?
while(count--)
{
*(unsigned char*)mcu_address=I2C_Receive_Byte()?
I2C_Ack()?
((unsigned char*)mcu_address)++?
A T24C64_address++?
}
*(unsigned char*)mcu_address=I2C_Receive_Byte()?
I2C_Nack()?
I2C_Stop()?
}
以上程序用序列读来实现从当前地址开始读取count个字节。
Linux下I2C驱动介绍
1、I2C概述 I2C是philips公司提供的外设总线,I2C有两条数据线,一条是串行数据线SDA、一条是时钟线SCL,使用SDA和SCL实现了数据的交换,便于布线。I2C总线方便用在EEPROM、实时钟、小型LCD等与CPU外部的接口上。 2、Linux下的驱动思路 Linux系统下编写I2c驱动主要有两种方法:一种是把I2C当做普通字符设备来使用;另一种利用Linux下驱动的体系结构来实现。 第一种方法: 优点:思路比较直接,不用花费大量时间去了解Linux系统下I2C体系结构 缺点:不仅对I2C设备操作要了解,还有了解I2C的适配器操作 不仅对I2C设备器和设备操作需要了解,编写的驱动移植性差,内核 提供的I2C设备器都没有用上。 第二种方法: 第一种的优点就是第二种的缺点,第一种的缺点就是第二种的优点。 3、I2C框架概述 Linux的I2C体系结构分为3部分: 1)I2C核心I2C核心提供了I2C总线驱动和设备驱动的注册和注销的方法,I2C 通信方法(algorithm)上层,与具体适配器无关的代码,检测设备上层的代 码等。 2)I2C总线驱动I2C总线驱动是对I2C硬件体系结构中适配器端的实现,适配器可以直接受CPU来控制。 3)I2C设备驱动I2C设备驱动是对I2C硬件体系结构中设备端的实现,设备端挂在受CPU控制的适配器上,通过I2C适配器与CPU交换数据。 Linux下的I2C体系结构: 1)Linux下的I2C体系结构 4、I2C设备驱动编写方法 首先让我们明白适配器驱动的作用是让我们能够通过它发出标准的I2C时序,在linux
内核源代码中driver/I2C/buss包含一些适配器的驱动,例如s3c2410的驱动I2C-s3c2410.c,适配器被加载到内核中,接下的任务就是实现设备驱动的编写。编写设备驱动的方法主要分为两种方法: 第一种:利用设备提供的I2C-dev.c来实现I2C适配器设备文件,然后通过上层应用程序来操作I2C设备器来控制I2C设备。 第二种:为I2C设备独立编写一个设备驱动 注意:第二种方法不能用设备提供的I2C-dev.c 5、I2C系统下的文件架构 在linux下driver下面有个I2C目录,在I2C目录下包含以下文件和文件夹 1)I2C-core.c 这个文件实现I2C核心功能以及/proc/bus/I2C*接口 2)I2C-dev.c 实现I2C适配器设备文件的功能,每个I2C适配器被分配一个设备,通过 适配器访问设备的时候,主设备号是89,此设备号是0-255. I2C-dev.c并没有针对特定设备而设计,只提供了read() write()和ioctl()等接口,应用层可以通过这些接口访问挂在适配器上的I2C设备存储空间和寄存器,并控制I2C设备的工作方式。 3)Chips 这个文件下面包含特定的I2C设备驱动。 4)Busses 这个文件包含一些I2C总线驱动。 5)Algos文件夹下实现了I2C总线适配器的algorithm 6、重要结构体 1)在内核中的I2C.h这个头文件中对I2C_driver;I2C_client;I2C_adapter和I2C_algorithm 这个四个结构体进行了定义。理解这4个结构体的作用十分关键。 i2c_adapter结构体 struct i2c_adapter { struct module *owner; //所属模块 unsigned int id; //algorithm的类型,定义于i2c-id.h, unsigned int class; const struct i2c_algorithm *algo; //总线通信方法结构体指针 void *algo_data;//algorithm数据 struct rt_mutex bus_lock; //控制并发访问的自旋锁 int timeout; int retries; //重试次数 struct device dev; //适配器设备 int nr; char name[48]; //适配器名称 struct completion dev_released; //用于同步 struct list_head userspace_clients; //client链表头
Linux下I2C驱动架构全面分析概要
Linux下I2C驱动架构全面分析 I2C概述 I2C是philips提岀的外设总线. I2C只有两条线,一条串行数据线:SDA, —条是时钟线SCL,使用SCL , SDA这两根信号线就实现了设备之间的数据交互,它方便了工程师的布线。 因此,I2C总线被非常广泛地应用在EEPROM,实时钟,小型LCD等设备与CPU的接口中。 linux下的驱动思路 在linux系统下编写I2C驱动,目前主要有两种方法,一种是把I2C设备当作一个普通的字符设备来处理,另一种是利用linux下I2C驱动体系结构来完成。下面比较下这两种方法: 第一种方法: 优点:思路比较直接,不需要花很多时间去了解linux中复杂的I2C子系统的操作方法。 缺点: 要求工程师不仅要对I2C设备的操作熟悉,而且要熟悉I2C的适配器(I2C控制器)操作。要求工程师对I2C的设备器及I2C的设备操作方法都比较熟悉,最重要的是写岀的程序可以移植性差。 对内核的资源无法直接使用,因为内核提供的所有I2C设备器以及设备驱动都是基于I2C 子系统的格式。 第一种方法的优点就是第二种方法的缺点, 第一种方法的缺点就是第二种方法的优点。 I2C架构概述 Linux的I2C体系结构分为3个组成部分: I2C核心:I2C核心提供了I2C总线驱动和设备驱动的注册,注销方法,I2C通信方法 (” algorithm 上层的,与具体适配器无关的代码以及探测设备,检测设备地址的上层代码等。 I2C总线驱动:I2C总线驱动是对I2C硬件体系结构中适配器端的实现,适配器可由CPU控制,甚至可以直接集成在CPU内部。 I2C设备驱动:I2C设备驱动(也称为客户驱动)是对I2C硬件体系结构中设备端的实现,设备一般挂接在受CPU控制的I2C适配器上,通过I2C适配器与CPU交换数据。
Linux驱动之i2c用户态调用
一、概述 I2C只有两条线,一条串行数据线:SDA,一条是时钟线SCL.正因为这样,它方便了工程人员的布线. 二、用户态实现设备驱动 在Linux内核代码文件i2c-dev.c中实现了I2C适配器设备文件的功能,针对每个适配器生成一个主设备号为89的设备节点(次设备号为0-255),I2c-dev.c并没有针对特定的设备而设计,只是提供了通用的read(),write(),和ioctl()等文件操作接口,在用户空间的应用层就可以借用这些接口访问挂接在适配器上的I2C设备的存储空间或寄存器,并控制I2C设备的工作方式。 i2c适配器的设备节点是/dev/i2c-x,其中x是数字。由于适配器编号是动态分配的(和注册次序有关),所以想了解哪一个适配器对应什么编号,可以查看/sys/class/i2c-dev/目录下的文件内容。 三、用户态调用 3.1、i2c-dev 用户空间操作i2c,需要包含以下头文件。 打开适配器对应的设备节点
i2c-dev为打开的线程建立一个i2c_client,但是这个i2c_client并不加到i2c_adapter的client链表当中。他是一个虚拟的临时client,当用户打开设备节点时,它自动产生,当用户关闭设备节点时,它自动被释放。 3.2、ioctl() 查看include/linux/i2c-dev.h文件,可以看到i2c支持的IOCTL命令1.#define I2C_RETRIES0x0701 /*设置收不到ACK时的重试次数*/ 2.#define I2C_TIMEOUT0x0702/*设置超 时时限的jiffies*/ 3.#define I2C_SLAVE0x0703/ *设置从机地址*/ 4.#define I2C_SLAVE_FORCE0x0706/*强制设置从机地 址*/ 5.#define I2C_TENBIT0x0704/* 选择地址位长:=0for7bit,!=0for10bit*/ 6.#define I2C_FUNCS0x0705/* 获取适配器支持的功能*/ 7.#define I2C_RDWR0x0707 /*Combin ed R/W transfer(one STOP only)*/ 8.#define I2C_PEC0 x0708/* !=0to use PEC with SMBus*/ 9.#define I2C_SMBUS0x0720 /*SMBus transfer*/
linux下iic(i2c)读写AT24C02
https://www.sodocs.net/doc/f218914481.html,/jammy_lee/ https://www.sodocs.net/doc/f218914481.html, linux下iic(i2c)读写AT24C02 linux驱动2010-02-09 16:02:03 阅读955 评论3 字号:大中小订阅 linux内核上已有iic的驱动,因此只需要对该iic设备文件进行读写则能够控制外围的iic器件。这里以AT24C02为对象,编写一个简单的读写应用程序。iic设备文件在我的开发板上/dev/i2c/0 ,打开文件为可读写。AT24C02的器件地址为0x50 ,既是iic总线上从器件的地址,每次只读写一字节数据。 /************************************************************/ //文件名:app_at24c02.c //功能:测试linux下iic读写at24c02程序 //使用说明: (1) // (2) // (3) // (4) //作者:jammy-lee //日期:2010-02-08 /************************************************************/ //包含头文件 #include
#include
I2C接口的输入与输出驱动的
I2C接口的输入与输出驱动的PCF8574- pcf8574采用I2C接口,有8个准双向口,可以和外部电路连接,来实现输入输出功能,可以用来对口线进行扩展 有几点需要注意 1.某位作为输入的时候,必须首先置为高电平 2.地址是0100 A2 A1 A0 R/W 3.最多可以扩展8片 4.低电流损耗,静态电流10uA,驱动电流比较大,而且有索存功能,能够驱动LED 发光管 5.带有外部中断输出,低电平有效 我作了一个电路,其中P7-P4作为输入检测开关状态,P3-P0作为输出来驱动LED 灯 程序如下 #include "reg51.h" #define SETBIT(VAR,Place) (VAR|=(1< unsigned char IC_Re_Time; unsigned char IC_Err_Flag; void Timer0_Init(void) { TMOD=0x00;//timer0工作定时器方式0,13位技术 TH0=0x1e;//5ms TL0=0x0c;//5ms TR0=1;//启动时钟0 ET0=1;//允许时钟0进行中断 EA=1;//开放所有中断 } void Delay(void) { unsigned char i; for(i=0;i<=10;i++) { ; } } unsigned char VALBIT(unsigned int Val,unsigned char Bit) { unsigned int Buf; Buf=0x0001; if(Bit) Buf<<=Bit; 实例解析linux内核I2C体系结构(2) 华清远见刘洪涛四、在内核里写i2c设备驱动的两种方式 前文介绍了利用/dev/i2c-0在应用层完成对i2c设备的操作,但很多时候我们还是习惯为i2c设备在内核层编写驱动程序。目前内核支持两种编写i2c驱动程序的方式。下面分别介绍这两种方式的实现。这里分别称这两种方式为“Adapter方式(LEGACY)”和“Probe方式(new style)”。 (1)Adapter方式(LEGACY) (下面的实例代码是在2.6.27内核的pca953x.c基础上修改的,原始代码采用的是本文将要讨论的第2种方式,即Probe方式) ●构建i2c_driver static struct i2c_driver pca953x_driver = { .driver = { .name= "pca953x", //名称 }, .id= ID_PCA9555,//id号 .attach_adapter= pca953x_attach_adapter, //调用适配器连接设备 .detach_client= pca953x_detach_client,//让设备脱离适配器 }; ●注册i2c_driver static int __init pca953x_init(void) { return i2c_add_driver(&pca953x_driver); } module_init(pca953x_init); ●attach_adapter动作 执行i2c_add_driver(&pca953x_driver)后会,如果内核中已经注册了i2c适配器,则顺序调用这些适配器来连接我们的i2c设备。此过程是通过调用i2c_driver中的attach_adapter方法完成的。具体实现形式如下: static int pca953x_attach_adapter(struct i2c_adapter *adapter) { return i2c_probe(adapter, &addr_data, pca953x_detect); /* adapter:适配器 addr_data:地址信息 pca953x_detect:探测到设备后调用的函数 */ } 地址信息addr_data是由下面代码指定的。 /* Addresses to scan */ static unsigned short normal_i2c[] = {0x20,0x21,0x22,0x23,0x24,0x25,0x26,0x27,I2C_CLIENT_END}; I2C_CLIENT_INSMOD; TI-I2C驱动 一、与I2C驱动相关的文件分成两部分: 1)应用层接口部分: 程序在svn中的路径如下: 在https://dareglob-971006/svn/eocOS/branches/eocOS_v4/branches/bsp/user/i2c目录下,i2ctest.c文件,提供了lm75a_temp_read()方法,用来读取LM75A设备温度寄存器中的温度信息的功能。 2)内核驱动部分: 内核位于svn中的路径如下: https://dareglob-971006/svn/eocOS/branches/eocOS_v4/branches/bsp/kernel (1)总线驱动: i2c-davinci.c:在内核目录中driver/i2c/busses目录下,适用于TI的I2C总线驱动程序。I2C总线驱动是对I2C硬件体系结构中适配器端的实现。 (2)I2C驱动代码核心: i2c-core.c:在内核目录中driver/i2c/目录下,是I2C代码的核心,用于沟通虚拟文件系统与底层实现。该文件提供了I2C总线驱动和设备驱动的注册、注销方法,I2C通信方法上层的、与具体适配器无关的代码以及探测设备、检测设备地址的上层代码等。 (3)I2C设备驱动: lm75.c:在内核目录中driver/hwmon目录下,是针对LM75A以及其他能兼容的温度传感器的设备驱动。I2C设备驱动是对I2C硬件体系结构中设备端的实现,设备一般挂接在受CPU控制的I2C适配器上,通过I2C适配器与CPU交换数据。二、I2C简要工作流程 1)在总线驱动初始化时候,当通过Linux内核源代码/driver/base/platform.c文件中定义platform_driver_register()函数注册platform_driver结构体时,其中probe指针指向的davinci_i2c_probe()函数将被调用,以初始化适配器硬件。 2)而davinci_i2c_remove()函数则完成与davinci_i2c_probe()相反的功能。用于内存和中断等系统资源的释放和注销。 3)总线驱动i2c-davinci.c中,定义了i2c_davinci_xfer函数。该函数是I2C总线通信传输函数。并且I2C适配器对应的i2c_algorithm结构体实例为i2c_davinci_algo,其中的master_xfer函数指针指向i2c_davinci_xfer函数。 4)当设备被打开,并且用户开始读操作时,会调用设备驱动lm75.c中show_temp()函数,该函数会调用i2c-core.c中的i2c_smbus_xfer()函数,i2c_smbus_xfer()函数会检查适配器对应的i2c_algorithm结构体中是否注册了smbus_xfer函数(目前i2c_davinci_algo中未注册smbus_xfer函数),程序会调用i2c_smbus_xfer_emulated()函数,最终,还是会调用标准的I2C总线通信函数master_xfer(),由于master_xfer 已经指向i2c_davinci_xfer函数,所以会调用总线驱动i2c-davinci.c中的i2c_davinci_xfer函数来读取信息。 三、接口函数 1)应用层接口: Int lm75a_temp_read(float *temp) 读取lm75a 温度 2)内核中:lm75.c文件 static ssize_t show_temp(struct device *dev, struct device_attribute *da,char *buf) I2C总线原理 ?什么是I2C总线? I2C即Inter IC,由Philips公司开发,是当今电子设计中应用非常广泛的串行总线之一,主要用于电压、温度监控,EEPROM数据的读写,光模块的管理等。 I2C总线只有两根线,SCL和SDA,SCL即Serial Clock,串行参考时钟,SDA即Serial Data,串行数据。 ?I2C总线的速率能达到多少? 标准模式下:100Kbps 快速模式下:400Kbps 高速模式下:3.4Mbps I2C总线结构如下图所示: 如上图所示,I2C是OC或OD输出结构,使用时必须在芯片外部进行上拉,上拉电阻R的取值根据I2C总线上所挂器件数量及I2C总线的速率有关,一般是标准模式下R选择10kohm,快速模式下R选取1kohm,I2C总线上挂的I2C器件越多,就要求I2C的驱动能力越强,R的取值就要越小,实际设计中,一般是先选取4.7kohm上拉 电阻,然后在调试的时候根据实测的I2C波形再调整R的值。 ?I2C总线上最多能挂多少个I2C器件? I2C总线上允许挂接I2C器件的数量由两个条件决定: 1).I2C从设备的地址位数。I2C标准中有7位地址和10位地址两种。如果是7位地址,允许挂接的I2C器件数量为:27=128,如果是10位地址,允许挂接的I2C 器件数量为:210=1024,一般I2C总线上挂接的I2C器件不会太多,所以现在几乎所有的I2C器件都使用7位地址。 2).挂在I2C总线上所有I2C器件的管脚寄生电容之和。I2C总线规范要求,I2C 总线容性负载最大不能超过470pF。 ?I2C总线是如何工作的? 1).I2C总线传输的特点。 I2C总线按字节传输,即每次传输8bits二进制数据,传输完毕后等待接收端的应答信号ACK,收到应答信号后再传输下一字节。等不到ACK信号后,传输终止。空闲情况下,SCL和SDA都处于高电平状态。 2).如何判断一次传输的开始? 如上图所示,I2C总线传输开始的标志是:SCL信号处于高电平期间,SDA信号出现一个由高电平向低电平的跳变。 3).如何判断一次传输的结束? 如上图所示,I2C总线传输结束的标志是:SCL信号处于高电平期间,SDA信号出现一个由低电平向高电平的跳变。跟开始标识正好相反。 4).什么样的I2C数据才是有效的。 #define _24cXX_H /* Includes ----------------------------------------------------------------*/ #include "stm32f10x.h" #include "value.h" //#include "stdbool.h" /* Define ------------------------------------------------------------------*/ /* EEPROM Addresses defines */ //注:32 64 的字地址是16位2个字节如果使用32或64请简单修改驱动即可 #define WC24cXX 0x00 // 器件地址写#define RC24cXX 0x01 // 器件地址读 #define USE_24C08 //使用24C08 #ifdef USE_24C02 #define MAXSIZE24cXX 256 // 总容量Bytes //级联时请修改本参数和硬件驱动 #define BLOCK_SIZE 256 // 块容量Bytes #define I2C_PAGESIZE 8 // 8个字节每页 #endif #ifdef USE_24C04 #define MAXSIZE24cXX 512 // 总容量Bytes //级联时请修改本参数和硬件驱动 #define BLOCK_SIZE 256 // 块容量Bytes #define I2C_PAGESIZE 16 // 16个字节每页 #endif #ifdef USE_24C08 #define MAXSIZE24cXX 1024 // 总容量Bytes //级联时请修改本参数和硬件驱动 #define BLOCK_SIZE 256 // 块容量Bytes #define I2C_PAGESIZE 16 // 16个字节每页 /* user define */ #define YBCV_ADDR_0 0x0000 //定义仪表控制数据结构体的EEPROM存储地址0 #define YBCV_ADDR_1 0x0200 //定义仪表控制数据结构体的EEPROM存储地址1 #define EEPROM_VERIFY YB_CTRL_V ALE_SIZE //EEPROM仪表通道修正参数存储地址 #endif #ifdef USE_24C16 #define MAXSIZE24cXX 2048 // 总容量Bytes #define I2C_PAGESIZE 16 // 16个字节每页 #endif Linux I2C 总线浅析 ㈠ Overview 内核空间层次! i2c adapter 是一个struct, 用来抽象一个物理i2c bus ,而且还和linux 设备驱动架构柔和在一起.. 如果只说硬件的话,就是在CPU内部集成的一个I2C控制器(提供给用户的就是那几个register),硬件上并没的所谓的adapter,client这些东东,,adapter和client都是linux 驱动软件抽象出来的东西 资料帖子: i2c_algorithm { /* If an adapter algorithm can't do I2C-level access, set master_xfer to NULL. If an adapter algorithm can do SMBus access, set smbus_xfer. If set to NULL, the SMBus protocol is simulated using common I2C messages */ /* master_xfer should return the number of messages successfully processed, or a negative value on error */ i nt (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs, int num); i nt (*smbus_xfer) (struct i2c_adapter *adap, u16 addr, unsigned short flags, char read_write, u8 command, int size, union i2c_smbus_data *data); /* To determine what the adapter supports */ u32 (*functionality) (struct i2c_adapter *); }; /* * i2c_adapter is the structure used to identify a physical i2c bus along * with the access algorithms necessary to access it. */ struct i2c_adapter { s truct module *owner; u nsigned int id; u nsigned int class; /* classes to allow probing for */ c onst struct i2c_algorithm *algo; /* the algorithm to access the bus */ v oid *algo_data; /* data fields that are valid for all devices */ u8 level; /* nesting level for lockdep */ s truct mutex bus_lock; i nt timeout; /* in jiffies */ i nt retries; s truct device dev; /* the adapter device */ i nt nr; c har name[48]; s truct completion dev_released; }; Linux的I2C体系结构分为3个组成部分: 1·I2C核心: I2C核心提供了I2C总线驱动和设备驱动的注册、注销方法,I2C通信方法(即“algorithm”)上层的、与具体适配器无关的代码以及探测设备、检测设备地址的上层代码等。这部分是与平台无关的。 2·I2C总线驱动: I2C总线驱动是对I2C硬件体系结构中适配器端的实现。I2C总线驱动主要包含了I2C适配 51单片机I2C总线驱动程序 SI2I2C 总线是PHLIPS 公司推出的一种串行总线,是具备多主机系统所需 的包括总线裁决和高低速器件同步功能的高性能串行总线。I2C 总线只有两根 双向信号线。一根是数据线SDA,另一根是时钟线SCL。 一.I2C 系统结构每个接到I2C 总线上的器件都有唯一的地址。主机与其它器 件间的数据传送可以是由主机发送数据到其它器件,这时主机即为发送器。由 总线上接收数据的器件则为接收器。 二.数据位的有效性规定I2C 总线进行数据传送时,时钟信号为高电平期间, 数据线上的数据必须保持稳定,只有在时钟线上的信号为低电平期间,数据线 上的高电平或低电平状态才允许变化。 三.字节传送与应答每一个字节必须保证是8 位长度。数据传送时,先传送最 高位(MSB),每一个被传送的字节后面都必须跟随一位应答位(即一帧共有 9 位)。 四.驱动程序#define uchar unsigned char#define uint unsigned int#define somenop() _nop_(),_nop_(),_nop_(),_nop_(),_nop_(),_nop_()sbit SCL=P2;sb it SDA=P2;123451.起始信号和终止信号 SCL 线为高电平期间,SDA 线由高电平向低电平的变化表示起始信号;SCL 线为高电平期间,SDA 线由低电平向高电平的变化表示终止信号。 起始和终止信号都是由主机发出的,在起始信号产生后,总线就处于被占用 的状态;在终止信号产生后,总线就处于空闲状态 void I2C_Start() //起始{SCL=1;somenop();SDA=1;somenop(); SDA=0;somenop();SCL=0;somenop();}void I2C_Stop() //终止{ SDA=0;somenop();SCL=1;somenop();SDA=1;somenop();}12345678910111213141 实例解析linux内核I2C体系结构 作者:刘洪涛,华清远见嵌入式学院讲师。 一、概述 谈到在linux系统下编写I2C驱动,目前主要有两种方式,一种是把I2C 设备当作一个普通的字符设备来处理,另一种是利用linux I2C驱动体系结构来完成。下面比较下这两种驱动。 第一种方法的好处(对应第二种方法的劣势)有: ●思路比较直接,不需要花时间去了解linux内核中复杂的I2C子系统的操作方法。 第一种方法问题(对应第二种方法的好处)有: ●要求工程师不仅要对I2C设备的操作熟悉,而且要熟悉I2C的适配器操作; ●要求工程师对I2C的设备器及I2C的设备操作方法都比较熟悉,最重要的是写出的程序可移植性差; ●对内核的资源无法直接使用。因为内核提供的所有I2C设备器及设备驱动都是基于I2C子系统的格式。I2C适配器的操作简单还好,如果遇到复杂的I2C适配器(如:基于PCI的I2C适配器),工作量就会大很多。 本文针对的对象是熟悉I2C协议,并且想使用linux内核子系统的开发人员。 网络和一些书籍上有介绍I2C子系统的源码结构。但发现很多开发人员看了这些文章后,还是不清楚自己究竟该做些什么。究其原因还是没弄清楚I2C子系统为我们做了些什么,以及我们怎样利用I2C子系统。本文首先要解决是如何利用现有内核支持的I2C适配器,完成对I2C设备的操作,然后再过度到适配器代码的编写。本文主要从解决问题的角度去写,不会涉及特别详细的代码跟踪。 二、I2C设备驱动程序编写 首先要明确适配器驱动的作用是让我们能够通过它发出符合I2C标准协议的时序。 在Linux内核源代码中的drivers/i2c/busses目录下包含着一些适配器的驱动。如S3C2410的驱动i2c-s3c2410.c。当适配器加载到内核后,接下来的工作就要针对具体的设备编写设备驱动了。 linux i2c驱动 1. i2c-dev interface I2C dev-interface 通常,i2c设备由某个内核驱动控制。但是在用户空间,也可以访问某个I2C设备:你需要 加载i2c-dev模块。 每个被注册的i2c适配器(控制器)会获得一个数字号,从0开始。你可以检查/sys/class/i2c-dev,来查看适配器对应哪个数字号。你也可以通过命令 "i2cdetect -l"获 取你的当前系统的所有I2c适配器的列表。i2cdetct是i2c-tool包中的一个工具。 i2c设备文件是字符设备,主设备号是89,次设备号的分配如上所述。设备文件名通常被 规定为"i2c-%d"(i2c-0, i2c-1, ...,i2c-10, ...)i2c设备文件是字符设备, 主设备号是 89,次设备号的分配如上所述。设备文件名通常被规定为"i2c-%d"(i2c-0, i2c-1, ...,i2c-10, ...).所有256个次设备号都保留给i2c使用。 C example ========= 假定你要在你的C应用程序中访问i2c适配器。第一件事情就是包含头文件 "#include 学习笔记1: Linux设备驱动程序之I2C 基础架构篇 I2C (Inter-Integrated Circuit)总线是一种由PHILIPS 公司开发的两线式串行总线,用于连接微控制器及其外围设备。I2C 总线最主要的优点是其简单性和有效性。由于接口直接在组件之上,因此I2C 总线占用的空间非常小,减少了电路板的空间和芯片管脚的数量,降低了互联成本。 I2C 总线概述 I2C 总线是由数据线SDA 和时钟SCL 构成的串行总线,可发送和接收数据,每个器件都有一个惟一的地址识别。I2C 规程运用主/从双向通讯。器件发送数据到总线上,则定义为发送器,器件接收数据则定义为接收器。主器件和从器件都可以工作于接收和发送状态。总线必须由主器件(通常为微控制器)控制,主器件产生串行时钟(SCL)控制总线的传输方向,并产生起始和停止条件。SDA线上的数据状态仅在SCL 为低电平的期间才能改变,SCL 为高电平的期间,SDA状态的改变被用来表示起始和停止条件。 另外,I2C是一种多主机控制总线.它和USB总线不同,USB是基于master-slave机制,任何设备的通信必须由主机发起才可以.而 I2C 是基于multi master机制.一同总线上可允许多个master. I2C 总线在传送数据过程中共有三种类型信号,它们分别是:开始信号、结束信号和应答信号。 开始信号:SCL 为高电平时,SDA 由高电平向低电平跳变,开始传送数据。 结束信号:SCL 为低电平时,SDA 由低电平向高电平跳变,结束传送数据。 应答信号:接收数据的IC 在接收到8bit 数据后,向发送数据的IC 发出特定的低电平脉冲,表示已收到数据。CPU 向受控单元发出一个信号后,等待受控单元发出一个应答信号,CPU 接收到应答信号后,根据实际情况作出是否继续传递信号的判断。若未收到应答信号,由判断为受控单元出现故障。 Linux 的I2C 驱动架构 Linux 中I2C 总线的驱动分为两个部分,总线驱动(BUS)和设备驱动(DEVICE)。其中总线驱动的职责,是为系统中每个I2C 总线增加相应的读写方法。但是总线驱动本身并不会进行任何的通讯,它只是存在那里,等待设备驱动调用其函数,参见图1。 设备驱动则是与挂在I2C 总线上的具体的设备通讯的驱动。通过I2C 总线驱动提供的函数,设备驱动可以忽略不同总线控制器的差异,不考虑其实现细节地与硬件设备通讯。 在我们的Linux 驱动的i2c 文件夹下有algos,busses,chips 三个文件夹,另外还有i2c-core.c 和i2c- dev.c 两个文件。其中i2c-core.c 文件实现了I2C core 框架,是Linux 内核用来维护和管理的I2C 的核心部分,其中维护了两个静态的List,分别记录系统中的I2C driver 结构和I2C adapter 结构。I2C core 提供接口函数,允许一个I2C adatper,I2C driver 和I2C client 初始化时在I2C core 中进行注册,以及退出时进行注销。同时还提供了I2C 总线读写访问的一般接口,主要应用在I2C 设备驱动中。Busses 文件夹下的i2c-mpc.c 文件实现了PowerPC 下I2C 总线适配器驱动,定义描述了具体的I2C 总线适配器的i2c_adapter 数据结构,实现比较底层的对I2C 总线访问的具体方法。I2C adapter 构造一个对I2C core 层接口的数据结构,并通过接口函数向I2C core 注册一个控制器。I2C adapter 主要实现对I2C 总线访问的算法,iic_xfer() 函数就是I2C adapter 底层对I2C 总线读写方法的实现。同时I2C adpter 中还实现了对I2C 控制器中断的处理函数。 i2c-dev.c 文件中实现了I2C driver,提供了一个通用的I2C 设备的驱动程序,实现了字符类型设备的访问接口,实现了对用户应用层的接口,提供用户程序访问I2C 设备,包括实现open,release,read,write 以及最重要的ioctl 等标准文件操作的接口函数。我们可以通过open 函数打开I2C 的设备文件,通过ioctl 函数设定要访问从设备的地址,然后就可以通过read 和write 函数完成对I2C 设备的读写操作。为了更方便和有效地使用I2C 设备,我们可以为一个具体的I2C 设备开发特定的I2C 设备驱动程序,在驱动中完成对特定的数据格式的解释以及实现一些专用的功能。 Android I2C精析 基于linux内核开发的arm系统,会用到很多components。要让这些components正常的工作,我们必须了解它们的接口,懂得如何去注册总线,初始化芯片,进而让芯片正常的工作。下面我会介绍在arm开发过程中使用最频繁的一些接口和总线的原理,以及如何在开发的过程中去使用它们。 1 I2C总线与接口 I2C总线具有结构简单,使用方便的特点。下面我会描述linux下I2C驱动的结构,幷给出I2C设备驱动和应用的实现。 1.1 I2C总线概述 I2C(Inter-Integrated Circuit)总线是由PHILIPS公司开发的两线式串行总线,用于连接微控制器及外围设备。是微电子通信控制领域广泛采用的一种总线标准。它是同步通信的一种特殊形式,具有接口线少,控制方式简单,器件封装形式小,通信速率较高等优点。 I2C总线是由数据线SDA和时钟SCL构成的串行总线,可发送和接收数据,每个器件都有一个惟一的地址识别。I2C 规程运用主/从双向通讯。器件发送数据到总线上,则定义为发送器,器件接收数据则定义为接收器。主器件和从器件都可以工作于接收和发送状态。总线必须由主器件(通常为微控制器)控制,主器件产生串行时钟(SCL)控制总线的传输方向,并产生起始和停止条件。SDA 线上的数据状态仅在SCL为低电平的期间才能改变,SCL为高电平的期间,SDA 状态的改变被用来表示起始和停止条件。 从理论上说一根I2C总线上可以挂载128个I2C设备,但是通常情况下,由于有些设备在传输数据时占用的I2C总线带宽频繁,所以我们在一根I2C总线上挂载的设备是越少越好。下面给出I2C总线的连线图: Linux I2C设备驱动编写(一) 在Linux驱动中I2C系统中主要包含以下几个成员: 如果一个I2C适配器不支持I2C通道,那么就将master_xfer成员设为NULL。如果适配器支持SMBUS 协议,那么需要去实现smbus_xfer,如果smbus_xfer指针被设为NULL,那么当使用SMBUS协议的时候将会通过I2C通道进行仿真。master_xfer指向的函数的返回值应该是已经成功处理的消息数,或者返回负数表示出错了。functionality指针很简单,告诉询问着这个I2C主控器都支持什么功能。 在内核的drivers/i2c/i2c-stub.c中实现了一个i2c adapter的例子,其中实现的是更为复杂的SMBUS。 SMBus 与I2C的区别 通常情况下,I2C和SMBus是兼容的,但是还是有些微妙的区别的。 时钟速度对比: 在电气特性上他们也有所不同,SMBus要求的电压范围更低。 I2C driver 具体的I2C设备驱动,如相机、传感器、触摸屏、背光控制器常见硬件设备大多都有或都是通过I2C 协议与主机进行数据传输、控制。结构体如下: 如同普通设备的驱动能够驱动多个设备一样,一个I2C driver也可以对应多个I2C client。以重力传感器AXLL34X为例,其实现的I2C驱动为: 这里要说明一下module_i2c_driver宏定义(i2c.h): module_driver(): 理解上述宏定义后,将module_i2c_driver(adxl34x_driver)展开就可以得到: 这一句宏就解决了模块module安装卸载的复杂代码。这样驱动开发者在实现I2C驱动时只要将i2c_driver结构体填充进来就可以了,无需关心设备的注册与反注册过程。 I2C client 即I2C设备。I2C设备的注册一般在板级代码中,在解析实例前还是先熟悉几个定义: 下面还是以adxl34x为例:实例解析linux内核I2C体系结构(2)
TI-I2C驱动
i2c总线原理
I2C 24CXX驱动程序(真正实用 全)
Linux_I2C总线分析(主要是probe的方式)1
51单片机I2C总线驱动程序
实例解析linux内核I2C体系结构
linux i2c驱动
学习笔记1-I2C架构篇
Android I2C精析
Linux I2C设备驱动编写
相关文档
- linux下i2c驱动源码详解
- I2C接口的输入与输出驱动的
- I2C接口的EEPROM 24C64芯片的驱动方法
- linux i2c驱动
- I2C_24C64驱动程序
- I2C总线芯片AT24C02驱动
- C51单片机模拟I2C总线驱动程序设计
- 51单片机I2C总线驱动程序
- i2c芯片的驱动程序(汇编)
- linux驱动(i2c接口)源代码(测试通过)
- i2c设备驱动实例分析
- I2C设备驱动介绍
- I2C接口的输入与输出驱动的PCF8574-
- C51单片机模拟I2C总线驱动程序
- I2C驱动架构
- I2C接口的EEPROM24C64芯片的驱动方法.pdf
- linux内核i2c驱动框图
- I2C 24CXX驱动程序(真正实用 全)
- I2C总线驱动在嵌入式系统中的两种实现,I2C,嵌入式,AR.
- stm32的ADS1110驱动程序(模拟I2C)
最新文档
- protel99SE元件库复合封装画法
- WIN7系统下Protel99se添加元件库和封装库
- 电路CAD实验报告Protel99SE_PCB元件封装的制作
- protel99se元件库
- protel电路常用元件及封装形式
- 人教版高中生物必修一第一单元复习试题及答案
- 高中生物第一单元生物和生物圈
- 高一生物第一单元习题及答案
- 高中生物必修第一单元《走近细胞》教案
- 高一生物第一单元知识点总结
- 生物高一第一单元知识点总结
- (完整版)高一生物必修1单元测试题及答案
- 第一单元走近细胞(单元教学设计)-高一生物系列(人教版2019必修1)(1)
- 高中生物 第一单元 生物个体的稳态与调节 第二章 动物稳态维持及其意义 1.2.1 内环境与稳态教案
- 高中生物必修一第一章单元测试题
- 人教版高中生物必修1《分子与细胞》知识点
- 高中生物必修一第一二章测试题(含答案)
- 高中生物 第一单元 第一章 细胞的概述 第二节 细胞的形态和功能教案 中图版必修1-中图版高中必修1
- 高一生物必修一第一单元测试题及答案
- 教师国培心得体会15篇