基于PLCopen标准的运动控制库
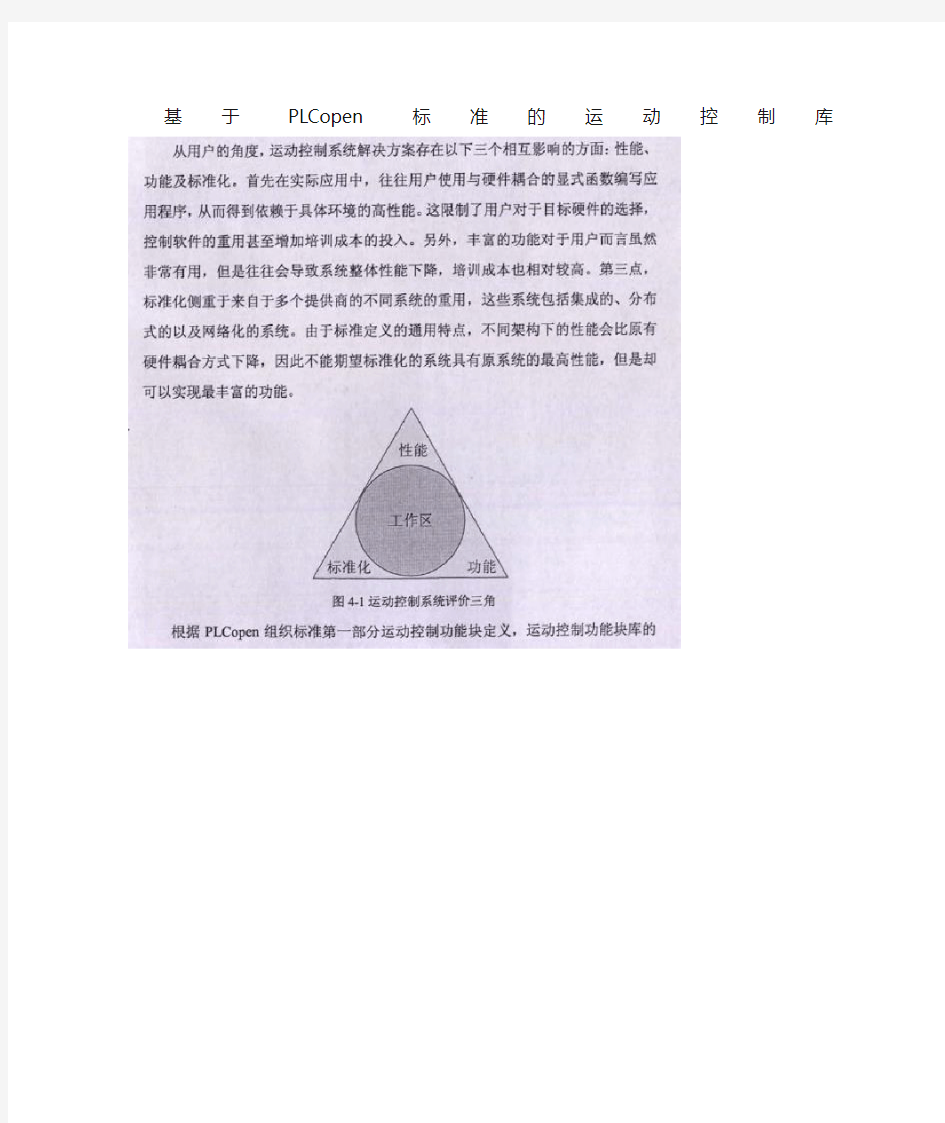

基于PLCopen标准的运动控制库
C语言标准库函数2012
常用C语言标准库函数2012 C语言编译系统提供了众多的预定义库函数和宏。用户在编写程序时,可以直接调用这些库函数和宏。这里选择了初学者常用的一些库函数,简单介绍了各函数的用法和所在的头文件。 1.测试函数 Isalnum 原型:int isalnum(int c) 功能:测试参数c是否为字母或数字:是则返回非零;否则返回零 头文件:ctype.h Isapha 原型:int isapha(int c) 功能:测试参数c是否为字母:是则返回非零;否则返回零 头文件:ctype.h Isascii 原型:int isascii(int c) 功能:测试参数c是否为ASCII码(0x00~0x7F):是则返回非零;否则返回零 头文件:ctype.h Iscntrl 原型:int iscntrl(int c) 功能:测试参数c是否为控制字符(0x00~0x1F、0x7F):是则返回非零;否则返回零 头文件:ctype.h Isdigit 原型:int isdigit(int c) 功能:测试参数c是否为数字:是则返回非零;否则返回零。 头文件:ctype.h Isgraph 原型:int isgraph(int c) 功能:测试参数c是否为可打印字符(0x21~0x7E):是则返回非零;否则返回零头文件:ctype.h Islower 原型:int islower(int c) 功能:测试参数c是否为小写字母:是则返回非零;否则返回零 头文件:ctype.h
Isprint 原型:int isprint(int c) 功能:测试参数c是否为可打印字符(含空格符0x20~0x7E):是则返回非零;否则返回零 头文件:ctype.h Ispunct 原型:int ispunct(int c) 功能:测试参数c是否为标点符号:是则返回非零;否则返回零 头文件:ctype.h Isupper 原型:int isupper(inr c) 功能:测试参数c是否为大写字母:是则返回非零;否则返回零 Isxdigit 原型:int isxdigit(int c) 功能:测试参数c是否为十六进制数:是则返回非零;否则返回零 2.数学函数 abs 原型:int abs(int i) 功能:返回整数型参数i的绝对值 头文件:stdlib.h,math.h acos 原型:double acos(double x) 功能:返回双精度参数x的反余弦三角函数值 头文件:math.h asin 原型:double asin(double x) 功能:返回双精度参数x的反正弦三角函数值 头文件:math.h atan 原型:double atan(double x) 功能:返回双精度参数的反正切三角函数值 头文件:math.h atan2 原型:double atan2(double y,double x) 功能:返回双精度参数y和x由式y/x所计算的反正切三角函数值 头文件:math.h cabs
运动控制系统基本要求
11级电气工程与自动化专业《运动控制系统》基本要求(2014-05-23) 第一章 绪论 了解本课程的研究内容。 第二章 (转速单)闭环控制的直流调速系统 1、 了解V (SCR )--M 、PWM--M 两种主电路方案及其特点(2.1节、P16、P97--98、笔记); 2、 他励(或永磁)直流电动机三种数学模型及转换,解耦模型中I do ~U d 环节的处理(P27--28、笔记); 3、 稳态性能指标中D 、S 间关系及适用范围(2.2.1节、P29--30、笔记); 4、 转速单闭环直流调速系统组成原理、特点及适用范围(P2 5、笔记); 5、 带电流截至负反馈的转速单闭环直流调速系统的组成原理、特点(笔记、2.5.2节)。 第三章 转速、电流反馈控制的直流调速系统 1、 双闭环直流调速系统的组成原理(主要指:V —M 不可逆调速系统、PWM-M 调速系统)、特点,符合实际的系统数学模型,静(稳)态参数的整定及计算(P60、P59--6 2、笔记); 2、 ASR 、ACR 的作用(P65); 3、 典1、典2系统的特点、适用范围、参数整定依据(3.3.2节、笔记); 4、 基于工程设计法的ASR 、ACR 调节器参数整定方法(P77--78、3.3.3节、例3-1、3-2、笔记); 5、 理解ASR 退饱和时的(阶跃响应)转速超调量等时域指标算式(P86--88、笔记); 6、 系统分别在正常恒流动态、稳态阶段,及机械堵转故障、转速反馈断开故障下的(新稳态)物理量计算; 7、 M 、T 、M/T 三种数字测速方法及特点(2.4.2节、笔记); 8、 了解了解M/T 数字测速的技术实现方法、系统控制器的技术实现方法(P82-85、笔记)。 第四章 可逆控制和弱磁控制的直流调速系统 1、 PWM--M 可逆直流调速系统组成原理及特点(4.1节,笔记) 2、 V (SCR )--M 可逆主电路中的环流概念、类型、特点(P103--104、笔记); 3、 常用的晶闸管-直流电动机可逆调速系统组成原理及特点(4.2.2节,图4-1 4、图4-1 5、4.2.3节)。 第五章 基于稳态模型的异步电动机调速系统 1、 异步电动机定子调压调速的机械特性簇与特点,转速闭环调压调速系统组成原理及适用范围(5.1--5.2节); 2、 软起动器的作用及适用条件(5.2.4节); 3、 异步电动机变压变频调速的基本协调控制关系(一点两段)及其依据(5.3.1节); 4、 异步电动机四种协调控制的特点,各自的机械特性簇、特点及比较(5.3.2节--5.3.3节、笔记); 5、 SPWM 、CFPWM 、SVPWM 变频调速器组成原理与特点,及其中各环节的作用(5.4节); 6、 了解基于转差频率控制的转速闭环变频变压调速系统的基本原理(5.6节)。 第六章 基于动态模型的异步电动机调速系统 1、 交流电动机坐标变换的作用,矢量控制(VC )的基本思想、特点(6.6、6.7、笔记); 2、 异步电动机VC 系统的一般组成原理(图6-20); 3、 了解各种具体的VC 系统组成方案,理解转子磁链直接与间接定向控制的区别(6.6. 4、6.6.6节、笔记); 4、 异步电动机直接转矩控制(DTC )系统的基本原理及特点(6.7.3节),DTC 与VC 的比较(6.8节)。 第七章 绕线转子异步电动机双馈调速系统 1、 绕线转子异步电动机次同步串级调速主电路及其工作原理,()S f β=公式及特点(7.2.1节、笔记); 2、 绕线转子异步电动机双闭环次同步串级调速系统组成原理;起动、停车操作步骤;(7.5、7.6、7.4.3节、笔记)。 第八章 同步电动机变压变频调速系统 1、 正弦波永磁同步电动机(PMSM )矢量控制系统组成原理,0sd i =时的转矩公式(8.4.3节); 2、 具有位置、速度闭环的正弦波永磁同步电动机(伺服)矢量控制系统组成原理(图8-26、27扩展、笔记)。 第九章 伺服系统 1、 位置伺服系统的典型结构(开环、半闭环、闭环、混合闭环)及特点(笔记、9.1.2); 2、 位置伺服系统的三种运行方式、位置伺服系统的三种方案;(笔记、9.3.2--9.3.4) 3、 数字伺服系统中电子齿轮的作用(笔记); 4、 数字式位置、速度伺服系统的指令形式(笔记)。 *** 考试须知---要点提示: (1)无证件者不能考试;(2)未交卷者中途不得离场;(3)严禁带手机到座位,操作手机者按作弊论处。 附:答疑地点(2-216)、时间:(1)2014-6-6,13:00--15:00;(2)2014-6-7,8:00--11:00,13:00--15:00。
C++string类标准库常用函数
C++ string类标准库常用函数 [string类的构造函数] string(const char *s); //用c字符串s初始化 string(int n,char c); //用n个字符c初始化 [string类的字符操作] const char &operator[](int n) const; const char &at(int n) const; char &operator[](int n); char &at(int n); operator[]和at()均返回当前字符串中第n个字符的位置,但at函数提供范围检查,当越界时会抛出out_of_range 异常,下标运算符[]不提供检查访问。 const char *data() const; //返回一个非null终止的c字符数组 const char *c_str() const; //返回一个以null终止的c字符串 int copy(char *s, int n, int pos = 0) const;//把当前串中以pos开始的n个字符拷贝到以s为起始位置的字符数组中,返回实际拷贝的数目 [string的特性描述] int capacity() const; //返回当前容量(即string中不必增加内存即可存放的元素个数) int max_size() const; //返回string对象中可存放的最大字符串的长度 int size() const; //返回当前字符串的大小 int length() const; //返回当前字符串的长度 bool empty() const; //当前字符串是否为空 void resize(int len,char c); //把字符串当前大小置为len,并用字符c填充不足的部分 [string类的输入输出操作] string类重载运算符operator>>用于输入,同样重载运算符operator<<用于输出操作。 函数getline(istream &in,string &s);用于从输入流in中读取字符串到s中,以换行符'\n'分开。 [string的赋值] string &operator=(const string &s); //把字符串s赋给当前字符串 string &assign(const char *s); //用c类型字符串s赋值 string &assign(const char *s,int n); //用c字符串s开始的n个字符赋值 string &assign(const string &s); //把字符串s赋给当前字符串 string &assign(int n,char c); //用n个字符c赋值给当前字符串 string &assign(const string &s,int start,int n);//把s中从start开始的n个字符赋给当前字符串string &assign(const_iterator first,const_iterator last);//把迭代器first和last之间的部分赋给字符串 [string的连接] string &operator+=(const string &s); //把字符串s连接到当前字符串的结尾 string &append(const char *s); //把c类型字符串s连接到当前字符串结尾 string &append(const char *s,int n); //把c类型字符串s的前n个字符连接到当前字符串结尾 string &append(const string &s); //同operator+=() string &append(const string &s,int pos,int n); //把字符串s中从pos开始的n个字符连接到当前字符串的结尾 string &append(int n,char c); //在当前字符串结尾添加n个字符c string &append(const_iterator first,const_iterator last); //把迭代器first和last之间的部分连接到当前字符串的结尾
机电运动控制系统离线作业必
机电运动控制系统离线作 业必 Newly compiled on November 23, 2020
浙江大学远程教育学院 《机电运动控制系统》课程作业(必做) 姓名:严超学号: 3 年级:16秋电气学习中心:武义 ————————————————————————————— 1.直流电机有哪些调速方法根据其速度公式说明之, 并说明如何釆用电力电子手段实现。 答:根据直流电机速度公式,有 (1)电枢电压Ua控制-调压调速(向下调速):采用电力电子手段时,有晶闸管可控整流器供电和自关断器件H型桥脉宽调制(PWM)供电等方式,其损耗小,控制性能好。 (2)磁场φ控制-弱磁(向上调速),采用电力电子手段时,有晶闸管可控整流器供电励磁控制。 (3)由于运行损耗大、效率低,一般不再采用串Ra调速。 2.画出双闭环晶闸管—直流电动机不可逆调速系统电原理图(非方块图),须清楚表达两个闭环的关键元件,写出各部分名称,标注有关信号量;指出两闭环连接上的特点及相互关系。 答:双闭环晶闸管-直流电动机不可逆调速系统电路原理图如下: 两闭环连接上的关系是速度调节器的输出作为电流调节器的输入,这就使得该系统具有由速度调节器的输出限幅值确定了电流环的给定值,进面确定了系统的最大电流的特点。 3.分析双闭环晶闸管—直流电动机不可逆调速系统:
(1) 如果要改变转速,应调节什么参数为什么 (2) 如要控制系统的起动电流、确保系统运行安全,应调节什么参数为什么 答:(1)改变转速时只能改变速度调节器的输入ug,因为它是速度环的指令信号。改变速度调节哭的参数对稳态速度无调节作用,仅会影响动态响应速度快慢。 (2)要控制系统的起动电流、确保系统运行安全,应调节速度调节器的输出限幅值。 因为速度调节器的输出限幅值确定了电流环的给定值,进而确定了系统的最大电流。 4. 填空 : 双闭环晶闸管━直流电动机调速系统中,内环为_电流_环,外环为_速度环,其连接关系是:_速度调节器_的输出作为__电流调节器的输入,因此外环调节器的输出限幅值应按__调速系统允许最大电流_来整定;内环调节器的输出限幅值应按__可控整流器晶闸管最大、最小移相触发角_来整定。两调节器均为_PI_型调节器,调速系统能够做到静态无差是由于调节器具有_积分(记忆)功能;能实现快速动态调节是由于节器具有__饱和限幅_功能。 5.在转速、电流双闭环系统中,速度调节器有哪些作用其输出限幅值应按什么要求来调整电流调节器有哪些作用其输出限幅值应如何调整 答:速度调节器用于对电机转速进行控制,以保障:①调速精度,做至静态无差;②机械特性硬,满足负载要求。 速度调节器输出限幅值应按速系统允许最大电流来调整,以确保系统运行安全(过电流保护) 电流调节器实现对电流的控制,以保障:①精确满足负载转矩大小要求(通过电流控制);②调速的快速动态特性(转矩的快速响应)。
c标准库函数大全
absread()读磁盘绝对扇区函数 原形:int absread(int drive,int num,int sectnum,void *buf) 功能:从drive指定的驱动器磁盘上,sectnum指定的逻辑扇区号开始读取(通过DOS中断0x25读取)num个(最多64K个)扇区的内容,储存于buf所指的缓冲区中。 参数:drive=0对应A盘,drive=1对应B盘。 返回值:0:成功;-1:失败。 头文件:dos.h abswrite()写磁盘绝对扇区函数 原形:int abswrite(int drive,int nsects,int lsect,void *buffer) drive=0(A驱动器)、1(B驱动器)、 nsects=要写的扇区数(最多64K个); lsect=起始逻辑扇区号; buffer=要写入数据的内存起始地址。 功能:将指定内容写入(调用DOS中断0x26)磁盘上的指定扇区,即使写入的地方是磁盘的逻辑结构、文件、FAT表和目录结构所在的扇区,也照常进行。 返回值:0:成功;-1:失败。 头文件:dos.h atof()将字符串转换成浮点数的函数 原形:double atof(const char *s) 功能:把s所指向的字符串转换成double类型。 s格式为:符号数字.数字E符号数字 返回值:字符串的转换值。 头文件:math.h、stdlib.h atoi()将字符串转换成整型数的函数 原形:int atoi(const char *s) 功能:把s所指向的字符串转换成int类型。 s格式为:符号数字 返回值:字符串的转换值。若出错则返回0。 头文件:stdlib.h atol()将字符串转换成长整型数的函数 原形:long atol(const char *s) 功能:把s所指向的字符串转换成long int类型。 s格式为:符号数字 返回值:字符串的转换值。若出错则返回0。 头文件:stdlib.h bcd()把一个数转换成对应的BCD码的函数 原形:bcd bcd(int x) bcd bcd(double x) bcd bcd(double x,int decimals)
几种运动控制系统的比较
运动控制的实现方法 1、以模拟电路硬接线方式建立的运动控制系统 早起的运动控制系统一般采用运算放大器等分离器件以硬接线的方式构成,这种系统的优点: (1)通过对输入信号的实时处理,可实现系统的高速控制。 (2)由于采用硬接线方式可以实现无限的采样频率,因此,控制器的精度较高并且具有较大的带宽。 然而,与数字化系统相比,模拟系统的缺陷也是很明显的: (1)老化与环境温度的变化对构成系统的元器件的参数影响很大。 (2)构成系统所需的元器件较多,从而增加了系统的复杂性,也使得系统最终的可靠性降低。 (3)由于系统设计采用的是硬接线的方式,当系统设计完成之后,升级或者功能修改几乎是不可能的事情。 (4)受最终系统规模的限制,很难实现运算量大、精度高、性能更加先进的复杂控制算法。 模糊控制系统的上述缺陷使它很难用于一些功能要求比较高的场合。然而,作为控制系统最早期的一种实现方式,它仍然在一些早期的系统中发挥作用; 另外,对于一些功能简单的电动机控制系统,仍然可以采用分立元件构成。 2、以微处理器为核心的运动控制系统 微处理器主要是指以MCS-51、MCS-96等为代表的8位或16位单片机。采用微处理器取代模拟电路作为电动机的控制器,所构成的系统具有以下的优点:(1)使电路更加简单。模拟电路为了实现逻辑控制需要很多的元器件,从而使电路变得复杂。采用微处理器以后,大多数控制逻辑可以采用软 件实现。 (2)可以实现复杂的控制算法。微处理器具有较强的逻辑功能,运算速度快、精度高、具有大容量的存储器,因此有能力实现较复杂的控制算 法。 (3)灵活性和适应性强。微处理器的控制方式主要是由软件实现,如果需要修改控制规律,一般不需要修改系统德硬件电路,只需要对系统的
运动控制系统第一章作业答案 曾毅编
【1-1】 某生产工艺要求:按动起动按钮S Ⅰ时,电动机M带动小车作如图题1-83所示的运动轨迹运行;按动暂停按钮S Ⅱ时,小车就地停止。重新按动启动按钮S Ⅰ时小车从暂停位置,开始键继续运行。假设:KM 1得电小车向右运行,KM 2得电小车向左运行,小车每次反向运行前都暂停t 秒。 1)试设计满足该运动轨迹的运动控制线路图。 2)当小车运行在B-C 区间时,如果突然停电或此时按动清零停止按钮,当来电后再按动起动按钮将会发生什么现象?如何处理这种问题? 解:1)假设:正反向速度继电器分别为:KS 1、KS 2;短路制动电阻的接触器为KM 3。 系统带降压起动电阻与反接制动的主电路图如答图1所示,其输出方程和控制方程如下: 图1-83 题1-1小车运行轨迹 答图1 题【1-1】(2)解答
2)来电后再按动起动按钮S I ,小车将一直向右走,出现失控现象。 解决续行问题的方法: ①最普通的方法是在运动轨迹的周边增加限位行程开关,并在输出方程中增加正反向点动按钮。假设:左、右限位保护分别为ST A 、ST B (如答图2所示) 、右限位;正、反向点动按钮分别为SF 、SR ,修改后的电气控制逻辑代数方程组: R F T F A R R B F S S t KT S S KM K ST K ST K ST K ST K ST S KM S ST KM KM S K K K KM S ST KM KM S K K K KM ?????+?+?+?+?+?+=????+++=←????+++=→)()()()(152413224131642225311ⅡⅡⅡⅡⅡ ②在控制方程组中与转步信号并联时间超限脉冲发生信号。 ③系统小车没有回到原点前,不清控制方程组,或者不要在控制方程中增加停止按钮。 ④增加回原点功能的按钮。 【1-2】 已知电动机M 1带动小车左右运动;电动机M 2带动小车上下运动。生产工艺要求的运动轨迹如图题1-84所示。假设:KM 1得电小车向右运行,KM 2得电小车向左运行;KM 3得电小车向上运行,KM 4得电小车向下运行。生产工艺要求分别按动启动按钮S 1、S 2、S 3时,小车的运行轨迹分别如图1-84a 、b 、c 所示;按动暂停按钮S Ⅱ,小车就地停止,小车每次转弯运行前都暂停t 秒,按动回原点按键S 0,小车会以最短的路径返回到原点A ,试设计满足该运动轨迹的运动控制线路图。 解:假设小车的转步信号及程序步如答图2所示 答图2 题【1-1】(2)解答
C语言常用的库函数
库函数并不是C语言的一部分,它是由编译系统根据一般用户的需要编制并 提供给用户使用的一组程序。每一种C编译系统都提供了一批库函数,不同的 编译系统所提供的库函数的数目和函数名以及函数功能是不完全相同的。ANSI C标准提出了一批建议提供的标准库函数。它包括了目前多数C编译系统所提供 的库函数,但也有一些是某些C编译系统未曾实现的。考虑到通用性,本附录 列出ANSI C建议的常用库函数。 由于C库函数的种类和数目很多,例如还有屏幕和图形函数、时间日期函数、 与系统有关的函数等,每一类函数又包括各种功能的函数,限于篇幅,本附录不 能全部介绍,只从教学需要的角度列出最基本的。读者在编写C程序时可根据 需要,查阅有关系统的函数使用手册。 1.数学函数 使用数学函数时,应该在源文件中使用预编译命令: #include
ACCESS数据库VBA常用标准函数新
Access数据库VBA常用标准函数 一、算术函数 1.绝对值函数:Abs(<表达式>) 返回数值表达式的绝对值。如Abs(-3)=3 2.向下取整函数:Int(<数值表达式>) 返回数值表达式的向下取整数的结果,参数为负值时返回小于等于参数值的第一负数。 3.取整函数:Fix(<数值表达式>) 返回数位表达式的整数部分,参数为负值时返回大于等于参数值的第一负数。 例如:Int(3.25)=3,Fix(3.25)=3但Int(-3.25)=-4,Fix(-3.25)=-3 4.四舍五入函数:Round(<数值表达式>[,<表达式>]) 按照指定的小数位数进入四舍五入运算的结果。[<表达式>]是进入四舍五入运算小数点右边应保留的位数。 例如:Round(3.255,1)=3.3;Round(3.754,2)=3.75;Round(3.754,0)=4 5.开平方函数:Sqr(<数值表达式>) 计算数值表达式的平方根。例如:Sqr(9)=3 6.产生随机数函数:Rnd(<数值表达式>) 产生一个0-1之间的随机数,为单精度类型。 例如:Int(100*Rnd)’产生[0,99]的随机整数Int(101*Rnd)’产生[0,100]的随机整数 7..求平均值函数Avg() 例如:在tstud表中求小于所有学生年龄的平均值的学生<(select avg([年龄])from tstud) 8..求和函数sum() 二、字符串函数 1.字符串检索函数:InStr([Start,]
C语言中最常用标准库函数 - candyliuxj - CSDN博客
C语言中最常用标准库函数- candyliuxj - CSDN博客 C语言中最常用标准库函数收藏 标准头文件包括: <asset.h> <ctype.h> <errno.h> <float.h> <limits.h> <locale.h> <math.h> <setjmp.h> <signal.h> <stdarg.h> <stddef.h> <stdlib.h> <stdio.h> <string.h> <time.h> 一、标准定义(<stddef.h>) 文件<stddef.h>里包含了标准库的一些常用定义,无论我们包含哪个标准头文件,<stddef.h>都会被自动包含进来。 这个文件里定义: l 类型size_t (sizeof运算符的结果类型,是某个无符号整型); l 类型ptrdiff_t(两个指针相减运算的结果类型,是某个有符号整型);
l 类型wchar_t (宽字符类型,是一个整型,其中足以存放本系统所支持的所有本地环境中的 字符集的所有编码值。这里还保证空字符的编码值为0); l 符号常量NULL (空指针值); l 宏offsetor (这是一个带参数的宏,第一个参数应是一个结构类型,第二个参数应是结构 成员名。offsetor(s,m)求出成员m在结构类型t的变量里的偏移量)。 注:其中有些定义也出现在其他头文件里(如NULL)。 二、错误信息(<errno.h>) <errno.h>定义了一个int类型的表达式errno,可以看作一个变量,其初始值为0,一些标准库函数执行中出错时将它设为非0值,但任何标准库函数都设置它为0。 <errno.h>里还定义了两个宏EDOM和ERANGE,都是非0的整数值。数学函数执行中遇到参数错误,就会将errno 置为EDOM,如出现值域错误就会将errno置为ERANGE。 三、输入输出函数(<stdio.h>) 文件打开和关闭: FILE *fopen(const char *filename, const char *mode); int fclose(FILE * stream);
运动控制新技术及其应用
运动控制的发展,前景,及其应用 运动控制技术的产生与发展现状 早期的运动控制技术主要是伴随着数控技术(CNC)、机器人技术(Robotics)和工厂自动化技术的发展而发展的。最初的运动控制器实际上是可以独立运行的专用控制器,往往无需另外的处理器和操作系统支持,可以独立完成运动控制功能、工艺技术要求的其他功能和人机交互功能。这类控制器可以成为独立运行(Stand-alone)的运动控制器,主要针对专门的数控机械和其他自动化设备而设计,往往已根据应用行业的工艺要求设计了功能,用户只需要按照其协议要求编写应用加工代码文件,利用RS232或者DNC方式传输到控制器,控制器即可完成相关的动作。但这类控制器往往不能离开其特定的工艺要求而跨行业应用,控制器的开放性仅仅依赖于控制器的加工代码协议,用户不能根据应用要求而重组自己的运动控制系统。通用运动控制器的发展成为市场的必然需求。1987年,美国政府组织开放式运动控制系统的研究,即下一代控制器(NGC)研究计划。该计划首先提出了开放体系结构控制器的概念,制定了/开放系统体系结构标准规格(OSACA)0。自1996年开始,美国几个大的科研机构对NGC计划分别发表了相应的研究成果,如美国国际标准研究院研制的/增强型机床控制器(EMC)0。美国通用、福特和克莱斯勒三大汽车公司研制的/开放式、模块化体系结构控制器(OMAC)0,其目的是用更加开放、更加模块化的控制结构使制造系统更加柔性、更加敏捷。近年来,随着运动控制技术的不断进步和完善,运动控制器作为一个独立的工业自动化控制类产品,已经被越来越多的产业领域接受,并且已经达到一个引人瞩目的市场规模。我国在运动控制器产品开发方面相对滞后, 1999年固高科技有限公司开始开发、生产开放式运动控制器,随后,国内又有其他几家公司进入该领域,但实际上,其大多是在国内推广国外生产的运动控制器产品,真正进行自主开发的公司较少。本文主要介绍了全闭环交流伺服驱动技术(Full Closed AC Servo)、直线电机驱动技术(Linear Motor Driving)、可编程序计算机控制器(Programmable Computer Controller,PCC)和运动控制卡(Motion Controlling Board)等几项具有代表性的新技术。 1 全闭环交流伺服驱动技术 在一些定位精度或动态响应要求比较高的机电一体化产品中,交流伺服系统的应用越来越广泛,其中数字式交流伺服系统更符合数字化控制模式的潮流,而且调试、使用十分简单,因而被受青睐。这种伺服系统的驱动器采用了先进的数字信号处理器(Digital Signal Processor, DSP),可以对电机轴后端部的光电编码器进行位置采样,在驱动器和电机之间构成位置和速度的闭环控制系统,并充分发挥DSP的高速运算能力,自动完成整个伺服系统的增益调节,甚至可以跟踪负载变化,实时调节系统增益;有的驱动器还具有快速傅立叶变换(FFT)的功能,测算出设备的机械共振点,并通过陷波滤波方式消除机械共振。一般情况下,这种数字式交流伺服系统大多工作在半闭环的控制方式,即伺服电机上的编码器反馈既作速度环,也作位置环。这种控制方式对于传动链上的间隙及误差不能克服或补偿。为了获得更高的控制精度,应在最终的运动部分安装高精度的检测元件(如光栅尺、光电编码器等),即实现全闭环控制。比较传统的全闭环控制方法是:伺服系统只接受速度指令,完成速度环的控制,位置环的控制由上位控制器来完成(大多数全闭环的机床数控系统就是这样)。这样大大增加了上位控制器的难度,也限制了伺服系统的推广。目前,国外已出现了一种更完善、可以实现更高精度的全闭环数字式伺服系统,使得高精度自动化设备的实现更为容易。 该系统克服了上述半闭环控制系统的缺陷,伺服驱动器可以直接采样装在最后一级机械运动部件上的位置反馈元件(如光栅尺、磁栅尺、旋转编码器等),作为位置环,而电机上的编码器反馈此时仅作为速度环。这样伺服系统就可以消除机械传动上存在的间隙(如齿轮间隙、丝杠间隙等),补偿机械传动件的制造误差(如丝杠螺距误差等),实现真正的全闭环位置控
C++常用标准库函数
C++常用库函数 1、常用数学函数 头文件#include
2、常用字符串处理函数 头文件#include
3、其他常用函数 头文件#include
4、实现键盘和文件输入/输出的成员函数 头文件#include
C++的头文件! #include
#include
浙大远程机电运动控制系统作业必做答案完整版
浙大远程机电运动控制 系统作业必做答案 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
机电运动控制系统(习题集) 必做作业 1.直流电机有哪些调速方法 根据其速度公式说明之, 并说明如何釆用电力电子手段实现。 答: 根据直流电机速度公式 φ φe a a a e C I R U C E n -== , 有 (1) 电枢电压 U a 控制 - 调压调速 (向下调速) 采用电力电子手段时,有晶闸管可控整流器供电和自关断器件H 型桥脉宽调制(PWM)供电等方式, 其损耗小,控制性能好。 (2) 磁场φ 控制 - 弱磁(向上调速),采用电力电子手段时,有晶闸管可控整流器供电励磁控制。 (3)由于运行损耗大、效率低, 一般不再釆用串 R a 调速。 2. 画出双闭环晶闸管—直流电动机不可逆调速系统电原理图(非方块图),须清楚表达两个闭环的关键元件,写出各部分名称,标注有关信号量;指出两闭环连接上的特点及相互关系。 答: 双闭环晶闸管—直流电动机不可逆调速系统电原理图如下: 两闭环连接上的关系是速度调节器的输出作为电流调节器的输入,这就使得该系统具有由速度调节器的输出限幅值确定了电流环的给定值,进而确定了系统的最大电流的特点。 3. 分析双闭环晶闸管—直流电动机不可逆调速系统: (1) 如果要改变转速,应调节什么参数为什么 (2) 如要控制系统的起动电流、确保系统运行安全,应调节什么参数为什么 答: (1) 改变转速时只能改变速度调节器的输入u g ,因为它是速度环的指令信号。改变速度调节器的参数对稳态速度无调节作用,仅会影响动态响应速度快慢。 (2) 要控制系统的起动电流、确保系统运行安全,应调节速度调节器的输出限幅值。因为速度调节器的输出限幅值确定了电流环的给定值,进而确定了系统的最大电流。
C++标准库和std命名空间
c++标准库及命名空间std 1、命名空间std C++标准中引入命名空间的概念,是为了解决不同模块或者函数库中相同标识符冲突的问题。有了命名空间的概念,标识符就被限制在特定的范围(函数)内,不会引起命名冲突。最典型的例子就是std命名空间,C++标准库中所有标识符都包含在该命名空间中。 如果确信在程序中引用某个或者某些程序库不会引起命名冲突(即库中的标识符不会在程序中代表其他函数名称),那么可以通过using操作符来简化对程序库中标识符(通常时函数)的使用,例如:using namespace std;那么就可以不用在标识符在前缀std::来使用C++标准库库中的函数了。
工作中最常用地excel函数公式大全
工作中最常用的excel函数公式大全 一、数字处理 1、取绝对值=ABS(数字) 2、取整=INT(数字) 3、四舍五入=ROUND(数字,小数位数) 二、判断公式 1、把公式产生的错误值显示为空 公式:C2=IFERROR(A2/B2,"") 说明:如果是错误值则显示为空,否则正常显示。 2、IF多条件判断返回值公式: C2=IF(AND(A2<500,B2="未到期"),"补款","") 说明:两个条件同时成立用AND,任一个成立用OR函数。
1、统计两个表格重复的内容 公式:B2=COUNTIF(Sheet15!A:A,A2) 说明:如果返回值大于0说明在另一个表中存在,0则不存在。 2、统计不重复的总人数 公式:C2=SUMPRODUCT(1/COUNTIF(A2:A8,A2:A8)) 说明:用COUNTIF统计出每人的出现次数,用1除的方式把出现次数变成分母,然后相加。
1、隔列求和 公式:H3=SUMIF($A$2:$G$2,H$2,A3:G3) 或=SUMPRODUCT((MOD(COLUMN(B3:G3),2)=0)*B3:G3) 说明:如果标题行没有规则用第2个公式 2、单条件求和 公式:F2=SUMIF(A:A,E2,C:C) 说明:SUMIF函数的基本用法
3、单条件模糊求和 公式:详见下图 说明:如果需要进行模糊求和,就需要掌握通配符的使用,其中星号是表示任意多个字符,如"*A*"就表示a前和后有任意多个字符,即包含A。 4、多条件模糊求和 公式:C11=SUMIFS(C2:C7,A2:A7,A11&"*",B2:B7,B11) 说明:在sumifs中可以使用通配符*
运动控制系统心得
电力拖动自动控制系统 -运动控制系统 系名:物电系 班级:电气工程及其自动化(1)班:昊哲 学号:201214240136
电力拖动自动控制系统 -运动控制系统 大三第二学期我接触到了一门很重要的专业课《电力拖动自动控制系统》,通过对这门课的学习使我对运动控制系统有了更深刻的理解。现代运动控制已成为电机学,电力电子技术,微电子技术,计算机控制技术,控制理论,信号检测与处理技术等多门学科相互交叉的综合性学科。文中简单介绍了运动控制及其相关学科的关系,随着其他相关学科的不断发展,运动控制系统也在不断发展,不断提高系统的安全性,可靠性。文中最后简述了其发展历程及其未来发展的展望。 电力拖动实现了电能与机械能之间的能量转换,而电力拖动自动控制系统—运动控制系统的任务是通过控制电动机电压、电流、频率等输入量,来改变工作机械的转矩、速度、位移等机械量,使各种工作机械按人们期望的要求运行,以满足生产工艺及其他应用的需要。工业生产和科学的发展,对运动控制系统提出新的更为复杂的要求,同时也为研制和生产各类新型控制系统提供可能。 运动控制系统分为两大部分的学习,第一部分为直流调速系统,第二部分为交流调速系统,其中第一部分为整本书重要掌握的容。 第一部分分为转速反馈控制的直流调速系统,转速、电流反馈的直流调速系统,可逆控制和弱磁控制的直流调速系统。第一部分中主要介绍直流调速系统,调节直流电动机的转速有三种方法:改变电枢
回路电阻,减弱磁通调速法,调节电枢电压调速法。 变压调速是是直流调速系统的主要方法,系统的硬件结构至少包含了两部分:能够调节直流电动机电枢电压的直流电源和产生被调节转速的直流电动机。随着电力电子技术的发展,可控直流电源主要有两大类,一类是相控整流器,它把交流电源直接转换成可控直流电源;另一类是直流脉宽变换器,它先把交流电整流成不可控的直流电,然后用PWM方式调节输出直流电压。本章说明了两类直流电源的特性和数学模型。当用可控直流电源和直流电动机组成一个直流调速系统时,它们所表现车来的性能指标和人们的期望值必然存在一个不小的差距,并做出了分析。开环控制系统无法满足人们期望的性能指标,本章就闭环控制的直流调速系统展开分析和讨论。论述哦了转速单闭环直流调速系统的控制规律,分析了系统的静差率,介绍了PI调节器和P调节器的控制作用。转速单闭环直流调速系统能够提高调速系统的稳态性能,但动态性能仍不理想,转速,电流双闭环直流调速系统是静动态性能良好,应用最广的直流调速系统;还介绍了转速,电流双闭环系统的组成及其静特性,数学模型,并对双闭环直流调速系统的动态特性进行了详细分析。本章对直流调速系统的数字实现进行了讨论,论述了与调速系统紧密关联的数字测速方法和数字PI调节器的实现方法,并用MATLAB仿真软件对转速,电流双闭环调速系统进行了仿真。 第二部分主要介绍交流调速系统。交流调速系统有异步电动机和同步电动机两大类。异步电动机调速系统分为3类:转差功率消耗型