功率

第七章功率
一.功率
1.定义:功跟完成这些功所用时间的,叫做功率.单位:,符号:.
2.物理意义:功率是描述力对物体做功的物理量.
3. 表达式:(1)定义式:P=,(2)计算式:P=
4.额定功率:发动机铭牌上所标注的功率为这部机械的额定功率,它是指机械__________时的输出功率.
实际功率:机械的功率是实际功率.
二、对公式Fv
P 的正确理解
1.当p一定时,要增加F,必须减小v,故汽车爬坡时,司机常换低挡降低速度来增大牵引力.
2.当F一定时,v增加(如匀加速运动),则p也会增加,但这样的过程是有限度的,当p增大到额定功率,p就不能再增加了.
3.当v一定时,p越大F就越大.如功率越大的起重机可吊起的重物的质量越大
1.(多选)关于力对物体做功的功率,下面几种说法中正确的是( ).
A.力对物体做功越多,这个力的功率就越大
B.力对物体做功的时间越短,这个力的功率就越大
C.力对物体做功少,其功率也可能很大;力对物体做功多,其功率也可能较小
D.功率是表示做功快慢的物理量,而不是表示做功大小的物理量
2.汽车以恒定功率P由静止出发,沿平直路面行驶,最大速度为v,则下列判断正确的是( ).A.汽车先做匀加速运动,最后做匀速运动
B.汽车先做加速度越来越大的加速运动,最后做匀速运动
C.汽车先做加速度越来越小的加速运动,最后做匀速运动
D.汽车先做加速运动,再做减速运动,最后做匀速运动
3.一质量为m的木块静止在光滑的水平面上,从t=0开始,将一个大小为F的水平恒力作用在该木块上,在t=T时刻F的功率是( ).
A.F2T2
m
B.
F2T
m
C.
F2T
2m
D.
F2T2
2m
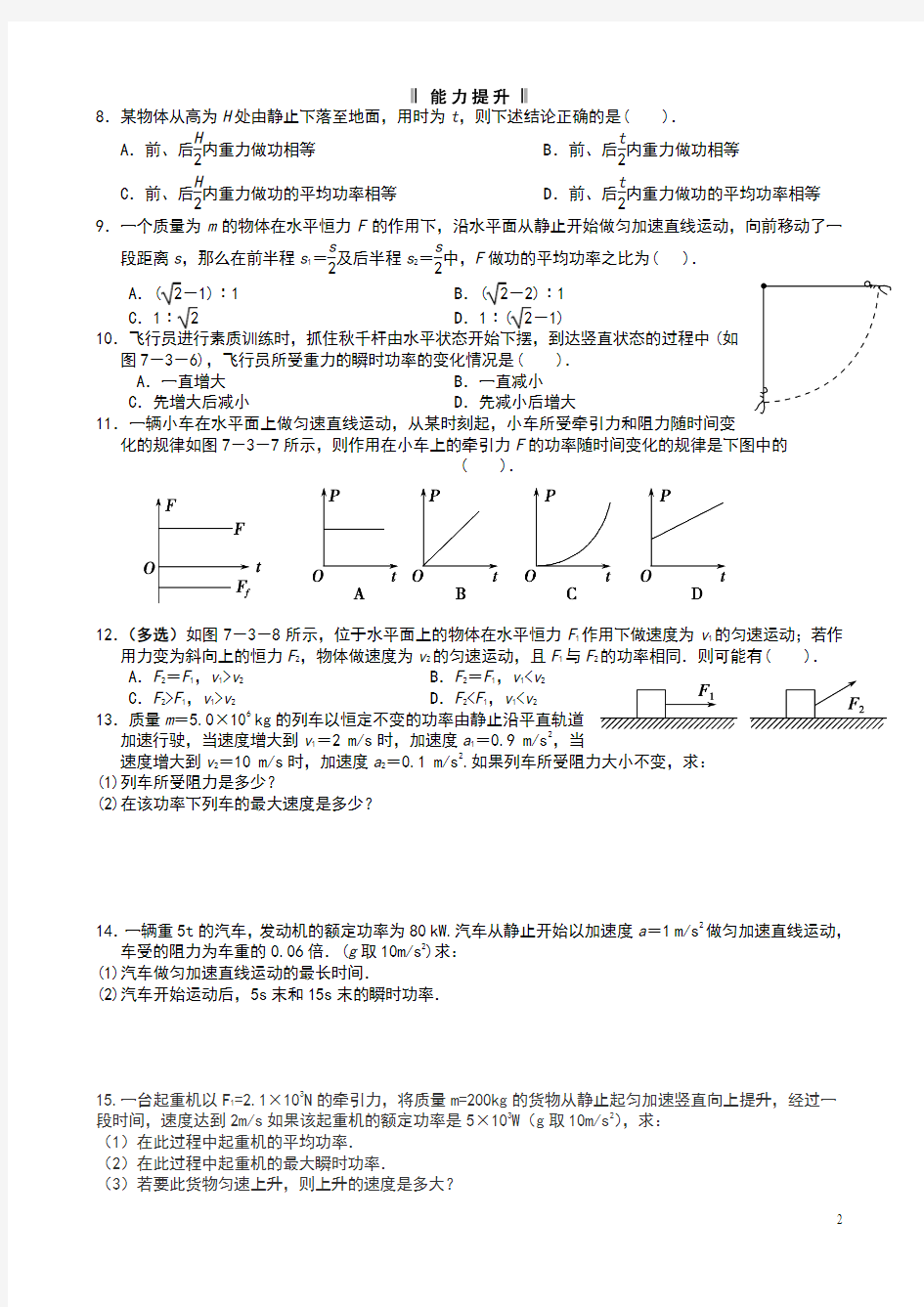
4.在距地面h高处,分别以速度v1和v2(v1 A.P A>P B B.P A=P B C.P A 5(多选).质量为m的汽车由静止开始以加速度a做匀加速运动,经过时间t,汽车达到额定功率,则下列说法正确的是( ). A.at即为汽车额定功率下的速度最大值 B.at还不是汽车额定功率下速度最大值 C.汽车的额定功率是ma2t D.题中所给条件求不出汽车的额定功率 6.如图7-3-5所示,一质量为m的物体,沿倾角为θ的光滑固定斜面由静止下滑,当它在竖直方向下落了h高度时,求重力的瞬时功率和整个过程中重力的平均功率. 7.质量为2000kg、额定功率为80kW的汽车,在平直公路上行驶中的最大速度为20m/s.若汽车从静止开始做匀加速直线运动,加速度大小为2m/s2,运动中的阻力不变.求: (1)汽车所受阻力的大小; (2)3s末汽车的瞬时功率; (3)汽车做匀加速运动的时间; (4)汽车在匀加速运动中牵引力所做的功. 8.某物体从高为H 处由静止下落至地面,用时为t ,则下述结论正确的是( ). A .前、后H 2内重力做功相等 B .前、后t 2 内重力做功相等 C .前、后H 2内重力做功的平均功率相等 D .前、后t 2 内重力做功的平均功率相等 9.一个质量为m 的物体在水平恒力F 的作用下,沿水平面从静止开始做匀加速直线运动,向前移动了一段距离s ,那么在前半程s 1=s 2及后半程s 2=s 2 中,F 做功的平均功率之比为( ). A .(2-1)∶1 B .(2-2)∶1 C .1∶ 2 D .1∶(2-1) 10.飞行员进行素质训练时,抓住秋千杆由水平状态开始下摆,到达竖直状态的过程中(如 图7-3-6),飞行员所受重力的瞬时功率的变化情况是( ). A .一直增大 B .一直减小 C .先增大后减小 D .先减小后增大 11.一辆小车在水平面上做匀速直线运动,从某时刻起,小车所受牵引力和阻力随时间变 化的规律如图7-3-7所示,则作用在小车上的牵引力F 的功率随时间变化的规律是下图中的 ( ). 12.(多选)如图7-3-8所示,位于水平面上的物体在水平恒力F 1作用下做速度为v 1的匀速运动;若作用力变为斜向上的恒力F 2,物体做速度为v 2的匀速运动,且F 1与F 2的功率相同.则可能有( ). A .F 2=F 1,v 1>v 2 B .F 2=F 1,v 1 C .F 2>F 1,v 1>v 2 D .F 2 13.质量m =5.0×106 kg 的列车以恒定不变的功率由静止沿平直轨道 加速行驶,当速度增大到v 1=2 m/s 时,加速度a 1=0.9 m/s 2,当 速度增大到v 2=10 m/s 时,加速度a 2=0.1 m/s 2.如果列车所受阻力大小不变,求: (1)列车所受阻力是多少? (2)在该功率下列车的最大速度是多少? 14.一辆重5t 的汽车,发动机的额定功率为80 kW.汽车从静止开始以加速度a =1 m/s 2做匀加速直线运动, 车受的阻力为车重的0.06倍.(g 取10m/s 2)求: (1)汽车做匀加速直线运动的最长时间. (2)汽车开始运动后,5s 末和15s 末的瞬时功率. 15.一台起重机以F 1=2.1×103N 的牵引力,将质量m=200kg 的货物从静止起匀加速竖直向上提升,经过一 段时间,速度达到2m/s 如果该起重机的额定功率是5×103W (g 取10m/s 2),求: (1)在此过程中起重机的平均功率. (2)在此过程中起重机的最大瞬时功率. (3)若要此货物匀速上升,则上升的速度是多大? 功率MOS管的五种损坏模式详解 第一种:雪崩破坏 如果在漏极-源极间外加超出器件额定VDSS的电涌电压,而且达到击穿电压V(BR)DSS (根据击穿电流其值不同),并超出一定的能量后就发生破坏的现象。 在介质负载的开关运行断开时产生的回扫电压,或者由漏磁电感产生的尖峰电压超出功率MOSFET的漏极额定耐压并进入击穿区而导致破坏的模式会引起雪崩破坏。 典型电路: 第二种:器件发热损坏 由超出安全区域引起发热而导致的。发热的原因分为直流功率和瞬态功率两种。直流功率原因:外加直流功率而导致的损耗引起的发热 ●导通电阻RDS(on)损耗(高温时RDS(on)增大,导致一定电流下,功耗增加)●由漏电流IDSS引起的损耗(和其他损耗相比极小) 瞬态功率原因:外加单触发脉冲 ●负载短路 ●开关损耗(接通、断开) *(与温度和工作频率是相关的) ●内置二极管的trr损耗(上下桥臂短路损耗)(与温度和工作频率是相关的)器件正常运行时不发生的负载短路等引起的过电流,造成瞬时局部发热而导致破坏。另外,由于热量不相配或开关频率太高使芯片不能正常散热时,持续的发热使温度超出沟道温度导致热击穿的破坏。 第三种:内置二极管破坏 在DS端间构成的寄生二极管运行时,由于在Flyback时功率MOSFET的寄生双极晶体管运行, 导致此二极管破坏的模式。 第四种:由寄生振荡导致的破坏 此破坏方式在并联时尤其容易发生 在并联功率MOS FET时未插入栅极电阻而直接连接时发生的栅极寄生振荡。高速反复接通、断开漏极-源极电压时,在由栅极-漏极电容Cgd(Crss)和栅极引脚电感Lg形成的谐振电路上发生此寄生振荡。当谐振条件(ωL=1/ωC)成立时,在栅极-源极间外加远远大于驱动电压Vgs(in)的振动电压,由于超出栅极-源极间额定电压导致栅极破坏,或者接通、断开漏极-源极间电压时的振动电压通过栅极-漏极电容Cgd和Vgs波形重叠导致正向反馈,因此可能会由于误动作引起振荡破坏。 电力系统实验指导书 第四章 电力系统功率特性和功率极限实验 一、实验目的 1. 初步掌握电力系统物理模拟实验的基本方法; 2. 加深理解功率极限的概念,在实验中体会各种提高功率极限措施的作用; 3. 通过对实验中各种现象的观察,结合所学的理论知识,培养理论结合实 际及分析问题的能力。 二、原理与说明 所谓简单电力系统,一般是指发电机通过变压器、输电线路与无限大容量母线联接而且不计各元件的电阻和导纳的输电系统。 对于简单系统,如发电机至系统d 轴和q 轴总电抗分别为X d 和X q ,则发电机的功率特性为: δδ2sin 2sin 2∑ ∑∑ ∑∑?-?+= q d q d d q Eq X X X X U X U E P 当发电机装有励磁调节器时,发电机电势E q 随运行情况而变化。根据一般励磁调节器的性能,可认为保持发电机E q (或E )恒定。这时发电机的功率特 性可表示成: δδ2sin 2sin 2∑ ∑∑∑∑?'-'?+''='q d q d d q Eq X X X X U X U E P 或 δ'''='∑sin d q E X U E P 这时功率极限为 ∑ '='d Em X U E P 随着电力系统的发展和扩大,电力系统的稳定性问题更加突出,而提高电力系统稳定性和输送能力的最重要手段之一是尽可能提高电力系统的功率极限,从 简单电力系统功率极限的表达式看,提高功率极限可以通过发电机装设性能良好的励磁调节器以提高发电机电势、增加并联运行线路回路数或串联电容补偿等手段以减少系统电抗、受端系统维持较高的运行电压水平或输电线采用中继同步调相机或中继电力系统以稳定系统中继点电压等手段实现。 三、实验项目和方法 (一)无调节励磁时功率特性和功率极限的测定 1.网络结构变化对系统静态稳定的影响(改变x) 在相同的运行条件下(即系统电压U x、发电机电势保持E q保持不变,即并网前U x=E q),测定输电线单回线和双回线运行时,发电机的功一角特性曲线,功率极限值和达到功率极限时的功角值。同时观察并记录系统中其他运行参数(如发电机端电压等)的变化。将两种情况下的结果加以比较和分析。 实验步骤: (1)输电线路为单回线; (2)发电机与系统并列后,调节发电机使其输出的有功和无功功率为零; (3)功率角指示器调零; (4)逐步增加发电机输出的有功功率,而发电机不调节励磁; (5)观察并记录系统中运行参数的变化,填入表4-1中; (6)输电线路为双回线,重复上述步骤,填入表4-2中。 表4-1 单回线 020406080 第九章 功率谱密度 张华,031120517 介绍 ● 确定信号的光谱分析:自相关——窗口式傅立叶变换 ● 平稳随机信号的光谱分析:方差——信号模型 ● 附加白噪声的正弦估计:消除干扰——eigen 分析 9.1基于DFT 的光谱分析 能量谱及相关特性:维纳-辛钦理论∑∞ -∞ =-= m fm j xx xx e m r m P π2)()( ● 离散傅立叶变换:理论的使用范围和频域取样; 窗口技术——转化结果的泄露和丢失 ● 时间/频率转换:不确定原则N Fs NT T f ==?= ?11 ● 零填充和有用的窗函数 维纳-辛钦理论 )] ()([)()()()()()(2* 2 2k m x m x E m r e m r f X f X e m x f X xx m mf j xx m mf j +== == ∑∑∞ -∞ =-∞ -∞=-ππ 9.1.1自相关估计 ● 平稳随机信号的光谱估计:1 ,1,0,)()(1)(1 -=+-=∑--=∧ N m m k x k x m N m r m N k xx ● Down_weight 估计: ∑--=∧+= ??? ??-≤-=1 ) ()(1 011)(m N k xx m k x k x N m r N m N m m w )(其他 )(m r xx ∧ 的均值和方差: 均值:)()1()]()([1 )]([1 m r N m m k x k x E N m r E xx m N k xx -=+= ∑--=∧ 方差:∑∞-∞ =∧ +-+=k xx xx xx xx m k r m k r k r N m r Var )]()()([1)]([2 9.1.2周期图法: 无参数的PSD 估计 周期图: 功率函数信号发生器的设计 一、概述 函数发生器作为一种常用的信号源,是现代测试领域内应用最为广泛的通用 仪器之一。在研制、生产、测试和维修各种电子元件、部件以及整机设备时,都要有信号源,由它产生不同频率不同波形的电压、电流信号并加到被测器件或设备上,用其他仪器观察、测量被测仪器的输出响应,以分析确定它们的性能参数。它可以产生多种波形信号,如正弦波,三角波,方波等,因而广泛用于通信、雷达、导航、宇航等领域。 函数信号发生器根据用途不同,有产生三种或多种波形的函数发生器,产生方波、正弦波、三角波的方案有多种,如先产生正弦波,根据周期性的非正弦波与正弦波所呈的某种确定的函数关系,再通过整形电路将正弦波转化为方波,经过积分电路后将其变为三角波;也可以先产生三角波-方波,再将三角波或方波转化为正弦波。 本实验要求实现频率范围在1~10kHz 连续可调输出并达到正弦波V V PP 5≤,方波V V PP 5≤,三角波V V PP 5=输出电压幅值要求,功率放大部分达到最大不失真输出功率W P o 2max ≥的要求范围,用数字频率显示实现1~10kHz 频率连续显示。 二、方案论证 设计一个功率函数信号发生器,使其能产生正弦波、三角波、方波,并能够对信号进行功率放大输出,且要求通过数字频率显示电路实时显示出信号频率。 方案一:采用RC 桥式文氏振荡电路产生正弦波,利用电压比较器将正弦波转化为方波,然后通过积分电路将方波转化为三角波,通过OCL 电路对其进行功率放大输出,最后通过数字频率显示电路实现波形频率实时显示。 方案二:首先产生三角波-方波,再通过电路将三角波变成正弦波或者将方波变成正弦波,然后对信号进行功率放大输出,最后通过8位单片机(如AT89S51)及其外围电路进行信号频率显示。 本实验采用的是方案一,通过RC 桥式文氏振荡电路产生正弦波的方案易于实现,性价比较高,且通过数字电路显示信号频率可以增加对已学数电知识的掌握 , 故 本 实 验 选 择 方 案 一 。 最全的功率计算公式 概述 ? ? ? ?功率包括电功率、机械功率。电功率又包括直流电功率、交流电功率和射频功率;交流功率又包括正弦电路功率和非正弦电路功率;机械功率又包括线位移功率和角位移功率,角位移功率常见于电机输出功率;电功率还可分为瞬时功率、平均功率(有功功率)、无功功率、视在功率。在电学中,不加特殊声明时,功率均指有功功率。在非正弦电路中,无功功率又可分为位移无功功率,畸变无功功率,两者的方和根称为广义无功功率。 本文列出了上述所有功率计算公式,文中p(t)指瞬时功率。u(t)、i(t)指瞬时电压和瞬时电流。U、I指电压、电流有效值,P指平均功率。 1普遍适用的功率计算公式 在电学中,下述瞬时功率计算公式普遍适用 在力学中,下述瞬时功率计算公式普遍适用 在电学和力学中,下述平均功率计算公式普遍适用 W为时间T内做的功。 在电学中,上述平均功率P也称有功功率,P=W/T作为有功功率计算公式普遍适用。 在电学中,公式(3)还可用下述积分方式表示 其中,T为周期交流电信号的周期、或直流电的任意一段时间、或非周期交流电的任意一段时间。电学中,公式(3)和(4)的物理意义完全相同。 电学中,对于二端元件或二端电路,下述视在功率计算公式普遍适用: 2直流电功率计算公式 已知电压、电流时采用上述计算公式。 已知电压、电阻时采用上述计算公式。 已知电流、电阻时采用上述计算公式。 针对直流电路,下图分别列出了电压、电流、功率、电阻之间相互换算关系。 ? 3正弦交流电功率计算公式 正弦交流电无功功率计算公式: 正弦交流电有功功率计算公式: 正弦电流电路中的有功功率、无功功率、和视在功率三者之间是一个直角三角形的关系: 当负载为纯电阻时,下式成立: 功率与扭矩的区别 马力和扭矩是发动机的重要参数,在各公司的产品目录上,都标明了各种发动机的最大马力和扭矩。下面首先介绍一下扭矩. 扭矩又叫转矩,是使轴旋转的力矩。在日本,扭矩的常用单位是kg·m,国际标准单位是N·m。为了更好地理解扭矩的概念,下面举几个例子。例如用扭力板力拧紧螺钉,如果钮力扳手的长度为1m的话,在扭力扳手一端加上1kg的力,则螺钉的拧紧扭矩为lkg·m。如果扭力扳手的长度为0.5m的话,为了得到1kg·m的扭矩,必须施加2kg的力。反过来也是一样,如果驱动扭矩相同,距离旋转中心越远的位置,产生的力越小。 扭矩这一术语用于各种场合,在技术文件上常常可以看到这样一些规定,如“本螺钉的拧紧扭矩应为××kg·m”。在摩托车上,常使用扭矩来表示曲轴的驱动力矩大小,曲轴的扭矩是摩托车驱动力的源泉。 在各种转速下,发动机产生的扭矩都各不一样。在发动机运转过程中,发动机输出扭矩和发动机的各个参数有关,如进气效率,燃烧情况、排气效率、配气相位、化油器尺寸等。而这些参数大都与发动机的转速有关,所以发动机的扭矩和转速关系十分密切。在摩托车转弯时,许多技术熟练的摩托车骑手,都能利用身体感受到的发动机扭矩变化,巧妙地加速并使摩托车后轮适当地打滑,从而减小摩托车的转弯半径。 在发动机实际运转过程中,使发动机转速变化能相应地引起扭矩的变化,并使输出的扭矩值产生变化。发动机型号不同,发动机扭矩和转速的相互关系也各不相同,一般常把钮矩和转速的关系叫做发动机的扭矩特性。 ●最大扭矩在油门全开时,发动机能产生最大扭矩。当然,在汽车和摩托车发动机油门全开时,发动机根本不可能保持某一固定转速。例如在油门全开加速时,发动机的转速将不断上升。从整车来看,这相当于摩托车从正常行驶转为加速超车,当然,这时发动机的运转工况因具体条件而异,也不一定是从最大扭矩的转速开始加速。在摩托车起步加速时,开始加速的转速将更低。 扭矩特性曲线大体可分为如下二大类,一种是平坦型,一种为陡峭型。如果在很大的转速范围内,发动机的扭矩变化不大,则这种发动机的扭矩特性曲线比较平坦,最大扭矩值相对较低。如果发动机最大扭矩的转速越高,与发动机最大功率点的转速越近,则这种发动机的功率转速范围就越窄,转速一旦降低,输出功率也随之而急剧下降,这种发动机的扭矩特性曲线比较陡娟。当然,大排量的发动机在各种转速都能获得很高的扭矩,排量越小的发动机扭矩越小,而且只能在进排气效率最高的转速条件下得到最大扭矩。也就是说,小排量发动机的扭矩持性比较敏感,扭矩的转速特性曲线比较陡峭。和汽车发动机相比,摩托车发动机排量较小,低速扭矩偏小。在小排量的条件下,为了获得较大的马力,必须提高最大扭矩的转速,所以摩托车扭矩特性曲线往往比较陡峭。 尽管摩托车的低速扭矩较低,但由于摩托车重量很轻,所以其加速性能大部分十分优异。当然,油门开度不同发动机的扭矩也不同。在转速相同的条件下,油门开度越大,发动机的扭矩也越大。实际上,油门开度变化之后,发动机的扭矩并不能立刻发生变化,二者之间总有一个时间差,这个时间差越大,说明该摩托车的油门响应性越差。和汽车不同,摩托车是一 1.电动机的容量就是电动机的功率。 电动机的容量与功率没有区别。 电动机可以小于额定功率(容量)工作,不可以大于额定功率(容量)工作。 2.要想使电动机在使用中效率最高,必须根据负载的不同性质来合理选择电动机的容量和型号。如电动机容量选择往往偏大。不仅造成投资的浪费,而且效率和功率因数也都不高,使电能浪费很大。电动机的容量选得过小,就会难于起动,或者勉强起动起来,工作电流也会超过电动机的额定电流,导致电动机绕组过热乃至烧毁。选择电动机容量时,还要考虑到供电变压器容量的大小。一般来说,直接起动的最大1台异步电动机的容量,不宜超过供电变压器容量的1/3。对连续运行的电动机,如与水泵、风机等配套的电动机,从节能的观点出发,电动机约在80%左右负载率运转时,效率最高。对农用电动机,其平均负载率运转时,效率最高。所以;对农用电动机,其平均负载为电动机额定存量的70%以上时.即可认为电动机容量的选择是合理的。对短时间运行的电动机,例如,与电动闸门配套的电动机,可以允许在比额定功率偏大的情况下运行,这应该依电动机的转矩是否能满足负载转矩的要求来确定。 1)如果电动机功率选得过小.就会出现“小马拉大车”现 象,造成电动机长期过载.使其绝缘因发热而损坏.甚至电动 机被烧毁。 (2)如果电动机功率选得过大.就会出现“大马拉小车”现 象.其输出机械功率不能得到充分利用,功率因数和效率都不 高(见表),不但对用户和电网不利。而且还会造成电能浪 费。 要正确选择电动机的功率,必须经过以下计算或比较: (1)对于恒定负载连续工作方式,如果知道负载的功率 (即生产机械轴上的功率)Pl(kw).可按下式计算所需电动机 的功率P(kw): P=P1/n1n2 式中 n1为生产机械的效率;n2为电动机的效率。即传动效 率。 按上式求出的功率,不一定与产品功率相同。因此.所选 电动机的额定功率应等于或稍大于计算所得的功率。 例:某生产机械的功率为3.95kw.机械效率为70%、如 果选用效率为0.8的电动机,试求该电动机的功率应为多少 kw? 解:P=P1/ n1n2=3.95/0.7*0.8=7.1kw 由于没有7.1kw这—规格.所以选用7.5kw的电动机。 (2)短时工作定额的电动机.与功率相同的连续工作定额 的电动机相比.最大转矩大,重量小,价格低。因此,在条件许 可时,应尽量选用短时工作定额的电动机。 (3)对于断续工作定额的电动机,其功率的选择、要根据 负载持续率的大小,选用专门用于断续运行方式的电动机。负 功率M O S管的五种损坏 模式详解 This manuscript was revised on November 28, 2020 功率MOS管的五种损坏模式详解 第一种:雪崩破坏 如果在漏极-源极间外加超出器件额定VDSS的电涌电压,而且达到击穿电压 V(BR)DSS (根据击穿电流其值不同),并超出一定的能量后就发生破坏的现象。 在介质负载的开关运行断开时产生的回扫电压,或者由漏磁电感产生的尖峰电压超出功率MOSFET的漏极额定耐压并进入击穿区而导致破坏的模式会引起雪崩破坏。典型电路: 第二种:器件发热损坏 由超出安全区域引起发热而导致的。发热的原因分为直流功率和瞬态功率两种。 直流功率原因:外加直流功率而导致的损耗引起的发热 ●导通电阻RDS(on)损耗(高温时RDS(on)增大,导致一定电流下,功耗增加) ●由漏电流IDSS引起的损耗(和其他损耗相比极小) 瞬态功率原因:外加单触发脉冲 ●负载短路 ●开关损耗(接通、断开) *(与温度和工作频率是相关的) ●内置二极管的trr损耗(上下桥臂短路损耗)(与温度和工作频率是相关的) 器件正常运行时不发生的负载短路等引起的过电流,造成瞬时局部发热而导致破坏。另外,由于热量不相配或开关频率太高使芯片不能正常散热时,持续的发热使温度超出沟道温度导致热击穿的破坏。 第三种:内置二极管破坏 在DS端间构成的寄生二极管运行时,由于在Flyback时功率MOSFET的寄生双极晶体管运行, 导致此二极管破坏的模式。 第四种:由寄生振荡导致的破坏 此破坏方式在并联时尤其容易发生 在并联功率MOS FET时未插入栅极电阻而直接连接时发生的栅极寄生振荡。高速反复接通、断开漏极-源极电压时,在由栅极-漏极电容Cgd(Crss)和栅极引脚电感Lg形成的谐振电路上发生此寄生振荡。当谐振条件(ωL=1/ωC)成立时,在栅极-源极间外加远远大于驱动电压Vgs(in)的振动电压,由于超出栅极-源极间额定电压导致栅极破坏,或者接通、断开漏极-源极间电压时的振动电压通过栅极-漏极电容Cgd和Vgs波形重叠导致正向反馈,因此可能会由于误动作引起振荡破坏。 第五种:栅极电涌、静电破坏 主要有因在栅极和源极之间如果存在电压浪涌和静电而引起的破坏,即栅极过电压破坏和由上电状态中静电在GS两端(包括安装和和测定设备的带电)而导致的栅极破坏 电力系统自动化设计报告设计课题:电力系统功率特性和功率极限试验 专业班级: 学生姓名:刘袁伟 学生学号: 指导教师: 成绩: 二○一一年四月 一、设计目的 1.初步掌握电力系统物理模拟实验的基本方法; 2.加深理解功率极限的概念,在实验中体会各种提高功率极限措施的作用; 3.通过对实验中各种现象的观察,结合所学的理论知识,培养理论结合实际及分 二、设计要求 通过电力系统物理模拟实验的基本方法,加深理解功率极限的概念,在试验中体会各种提高功率极限措施的作用;通过对实验中各种现象的观察,结合所学的理论知识,培养理论结合实际及分析问题的能力。 三、方案所需设备 1.WDT-III电力系统综合自动化试验台 四、设计原理 (一)发电机的功率特性方程 发电机输出的电磁功率和功率角的关系,称为发电机的功率特性。这是分析电力系统稳定性问题的一个重要方法。 1.隐极式发电机的功率特性方程 隐极式发电机的转子是对称的,因而它的纵轴同步电抗和横轴同步电抗是相等的,当不计各元件的电阻及对地导纳支路时,发电机至系统总电抗为Xd。 ①以空载电动势和同步电抗表示的功率特性方程 当发电机与无限大容量母线相连时,母线电压U=定值,如果发电机有自动调节励磁装置,并保持Eq=定值,则式(5-1)中将只有一个变量——功率角,可做出发电机的功率特性曲线,如图5-1所示。由图可见,发电机功率特性曲线为一正弦曲线,其最大值为称功率极限。功率角 在电力系统稳定问题的研究中占有特别重要的地位。它除了表示电动势和电压之间的相位差,即表征系统的电磁关系之外,还表示了各发电机转子之间的相对空间位置。 角随时间的变化描述了各发电机转子间的相对运动。如两个发电机电气角速度相同,则 角保持不变。如增大送端发电机的原动机功率,使PT1>PT0,则由于发电机转子上的转子平衡遭到破坏,发电机转子加速,发电机转子间的相对空间位置便要发生变化,功率角 增大,直至达到新的平衡点。 ②以暂态电动势和暂态电抗表示的功率特性方程 在分析暂态稳定或近似地分析某些有自动调节励磁装置的静态稳定时,往往以横轴暂态电动势和纵轴暂态电抗表示发电机。在这种情况下的功率特性方程为: 当发电机与无限大容量母线相连时,U=定值,且发电机装有自动调节励磁装置,并能保持q E =定值。取不同的 值代入式(6-8)中,可绘制出这种情况下发电机的功率特性曲线. 由于纵轴暂态电抗和其同步电抗不等,出现了一个按两倍功率角正弦sin2 变化的功率分量,一般称暂态磁阻功率。由于它的存在,使功率特性曲线发生了畸变,而使功率极限略有增加, 低功率设计中不同功率格式的应用 对于低功率设计,既然存在两种相互竞争的获取功率目的的行业格式——共同功率格式(CPF)和统一功率格式(UPF)——设计组必须理解这两种格式之间的相似点和不同点。有些设计公司可能会忽视其中的一种格式,但是大部分设计公司将同时使用两种格式。 CPF文件格式的第一个参考文献出现在2006年早期,Cadence宣布了它的Power Forward Initiative。2006年后期,Cadence和Silicon Integration Initiative公司(Si2)在 Si2的资助下创建了低功率联盟(LPC),专注于发展CPF格式。 2007年1月,LPC公布了包含CPF格式定义的第一个公开文件。该文件可在https://www.sodocs.net/doc/ac2804634.html, 网站下载。Cadence的软件组支持CPF,多个EDA卖主也支持LPC文件中定义的格式。在DAC 2006年,在德州仪器和诺基亚公司带领下,许多其他公司通过会议创建了由泛EDA公司支持的第二种格式。这一格式称作统一功率格式,而Accellera组建了一个委员会来敲定所有的细节。 2007年1月,Accellera公布了它的UPF 1.0说明书。这一文件公布在https://www.sodocs.net/doc/ac2804634.html, 网站。2008年1月Magma,Mentor,以及Synopsys公司联合宣称在他们的软件中支持UPF。并且再次,许多其他EDA卖家也支持这一格式。 在2007年间,IEEE组建了一个工作组来开发一种行业标准的以功率为目的的格式。这个标准将叫做IEEE-P1801。该工作组接受以现有格式的贡献为起点。Accellera公司贡献了UPF,但是Cadence却没有贡献CPF。 格式的相似点 CPF和UPF格式采用完全不同的句法,却有90%相同的概念。但是在任意一格式中,都有用于低功率设计的功率目的的所有主要特征。两种格式都基于Tcl——嵌入多数EDA软件的软件控制语言。因此,我们可以把任意一种格式当作一组Tcl的程序定义,而不是一种新的独特的语言。特别是,两种格式提供一种方法来描述: - 电压域或模块,在不同的电压下运行,要求在所有的域交叉处都有电平开关; - 功率域或模块,带有独立电源的电源,可关闭; - 若干供应网,有不同名称和不同连接;在这种设计形式中,不存在任何单个的全程功率连接; - 绝缘逻辑,安放于功率域的输出端,该处只有一个逻辑结点,能保持功率开启; - 存储寄存器,是功率域中的触发器,当域关闭时,有一个“保持开启”的供应连接来保持状态; - 功率域中用于逻辑的保持开启元件和通道(与存储寄存器相邻),当包含它们的模块关闭时必须保持功率开启; - 功率开关,是大的芯片级开关晶体管,用来断开进入一个功率域的功率。 除了一些非常小的方面,任何采用以上特征的设计都完全可以用CPF或UPF表示。但是,CPF表示的句法与UPF表示的句法完全不同。每个文件都会有许多命令及对每个命令的选择,来获取功率目的。 谱让人联想到的Fourier变换,是一个时间平均(time average)概念,对能量就是能量谱,对功率就是功率谱。 功率谱的概念是针对功率有限信号的,所表现的是单位频带内信号功率随频率的变化情况。保留了频谱的幅度信息,但是丢掉了相位信息,所以频谱不同的信号其功率谱是可能相同的。 有两点需要注意: 1. 功率谱是随机过程的统计平均概念,平稳随机过程的功率谱是一个确定函数;而频谱是随机过程样本的Fourier变换,对于一个随机过程而言,频谱也是一个“随机过程”。(随机的频域序列) 2. 功率概念和幅度概念的差别。此外,只能对宽平稳的各态历经的二阶矩过程谈功率谱,其存在性取决于二阶矩是否存在并且二阶矩的Fourier变换收敛;而频谱的存在性仅仅取决于该随机过程的该样本的Fourier变换是否收敛。 频谱分析: 对动态信号在频率域内进行分析,分析的结果是以频率为坐标的各种物理量的谱线和曲线,可得到各种幅值以频率为变量的频谱函数F(ω)。频谱分析中可求得幅值谱、相位谱、功率谱和各种谱密度等等。频谱分析过程较为复杂,它是以傅里叶级数和傅里叶积分为基础的。 功率谱密度: 功率谱密度(PSD),它定义了信号或者时间序列的功率如何随频率分布。这里功率可能是实际物理上的功率,或者更经常便于表示抽象的信号被定义为信号数值的平方,也就是当信号的负载为1欧姆(ohm)时的实际功率。 由于平均值不为零的信号不是平方可积的,所以在这种情况下就没有傅里叶变换。维纳-辛钦定理(Wiener-Khinchin theorem)提供了一个简单的替换方法,如果信号可以看作是平稳随机过程,那么功率谱密度就是信号自相关函数的傅里叶变换。 信号的功率谱密度当且仅当信号是广义的平稳过程的时候才存在。如果信号不是平稳过程,那么自相关函数一定是两个变量的函数,这样就不存在功率谱密度,但是可以使用类似的技术估计时变谱密度。 随机信号是时域无限信号,不具备可积分条件,因此不能直接进行傅氏变换。一般用具有统计特性的功率谱来作为谱分析的依据。 功率谱与自相关函数是一个傅氏变换对。 功率谱具有单位频率的平均功率量纲。所以标准叫法是功率谱密度。从名字分解来看就是说,观察对象是功率,观察域是谱域。 通过功率谱密度函数,可以看出随机信号的能量随着频率的分布情况。像白噪声就是平行于一条直线。 一般我们讲的功率谱密度都是针对平稳随机过程的,由于平稳随机过程的样本函数一般不是绝对可积的,因此不能直接对它进行傅立叶分析。可以有三种办法来重新定义谱密度,来克服上述困难。 1. 用相关函数的傅立叶变换来定义谱密度; 2. 用随机过程的有限时间傅立叶变换来定义谱密度; 3. 用平稳随机过程的谱分解来定义谱密度。 三种定义方式对应于不同的用处,首先第一种方式前提是平稳随机过程不包含周 PWM DC-DC 功率变换器的两种工作模式 普高(杭州)科技开发有限公式 张兴柱 博士 任何一个PWM DC-DC 功率变换器,当输入或者负载发生变化时,其在一个开关周期内的工作间隔数量也会发生变化。为了容易理解,先以电流负载下的Buck 变换器为例子,来说明这种变化。 oL 在负载电流比较大时,该变换器的一个开关周期内,只有两种工作间隔,即有源开关AS 导通、无源开关PS 截止的s DT 间隔,和有源开关AS 截止,无源开关PS 导通的s T D ′间隔。这种工作模式下,电感上的电流始终大于零,称为电感电流连续导电模式,简称为CCM 模式。 由于电容C 上满足安秒平衡定律,也即其在一个开关周期内的平均电流为零,所以电感电流在一个开关周期内的平均值必等于负载电流。当负载电流变小时,电感电流在一个开关周期内的平均值也必然变小,当变小到上图中红色波形的负载电流时,如果再继续变小负载电流的话,电感电流在有源开关AS 截止的间隔内,将减小到零。当无源开关采用二极管时,由于二极管的单向导电特性,一旦流过二极管的电流(在本例子中,即为电感电流)降为零时,二极管就会自动关断而截止,因此在这个负载之下的负载,变换器在一个开关周期内,会增加一个工作间隔,即s T D ′′间隔,这个间隔中的有源开关和无源开关均截止,这样的工作模式被称为电感电流不连续导电模式,简称DCM 模式。其电感电流的波形中,有一段时间的电流为零,如下图所示。 L 任何PWM DC-DC 功率变换器,只要其无源开关采用二极管,那么在它的稳态工作点范围内,通常均有存在两种不同工作模式工作点的可能。这两种工作模式的转换之处,一般称作CCM/DCM 的边界,如上例中红色电感电流波形所对应的负载,即为CCM/DCM 的边界负载,在这个负载之上的负载,变换器工作于CCM ;在这个负载之下的负载,变换器工作于DCM 。 t=0:0.0001:0.1; %时间间隔为0.0001,说明采样频率为10000Hz x=square(2*pi*1000*t); %产生基频为1000Hz的方波信号 n=randn(size(t)); %白噪声 f=x+n; %在信号中加入白噪声 figure(1); subplot(2,1,1); plot(f); %画出原始信号的波形图 ylabel('幅值(V)'); xlabel('时间(s)'); title('原始信号'); y=fft(f,1000); %对原始信号进行离散傅里叶变换,参加DFT采样点的个数为1000 subplot(2,1,2); m=abs(y); f1=(0:length(y)/2-1)'*10000/length(y);%计算变换后不同点对应的幅值plot(f1,m(1:length(y)/2)); ylabel('幅值的模'); xlabel('时间(s)'); title('原始信号傅里叶变换'); %用周期图法估计功率谱密度 p=y.*conj(y)/1000; %计算功率谱密度 ff=10000*(0:499)/1000; %计算变换后不同点对应的频率值 figure(2); plot(ff,p(1:500)); ylabel('幅值'); xlabel('频率(Hz)'); title('功率谱密度(周期图法)'); 功率谱估计在现代信号处理中是一个很重要的课题,涉及的问题很多。在这里,结合matlab,我做一个粗略介绍。功率谱估计可以分为经典谱估计方法与现代谱估计方法。经典谱估计中最简单的就是周期图法,又分为直接法与间接法。直接法先取N点数据的傅里叶变换(即频谱),然后取频谱与其共轭的乘积,就得到功率谱的估计;间接法先计 华 伟 1965年生,1990 年获北京工业大学功率半 导体器件专业工学硕士学位,副教授,从事新型电力电子器件应用及开关功率变换器的教学和科研工作。 设计与研究 30k W 电流模式PWM 控制的 DC DC 功率变换器 北方交通大学(北京100044) 华 伟 摘 要:新型30k W 电流模式P WM 控制的功率变换器采用N PT -IGBT 器件,无需串联隔直防偏磁电容,使用有源斜坡补偿技术,效率达到90%,具有极好的动态响应、过流保护及模块均流并联性能,是一种具有极大功率扩容(可达到100k W )潜力并易于工程化实现的IGBT 功率变换器。 关键词:电流模式 IGBT 全桥拓扑 开关模式整流器 变换器 收修改稿日期:1999203215 30k W curren t m ode P WM con trolled DC DC power converter N o rthern J iao tong U n iversity (B eijing 100044) Hua W e i Abstract :P resen ted in the paper is a novel 30k W cu rren t mode P WM con tro lled pow er converter .T he converter ,of w h ich the efficiency reaches 90%,app lies N PT -IGBT device and an active slope compen sati on techno logy w ith no need to series connect a DC b lock ing and b ias 2p roof capacito r .It featu res excellen t dynam ic respon se ,over 2cu rren t p ro tecti on ,parallel modu le cu rren t equalizati on ,very h igh pow er expan si on po ten tial (as h igh as 100k W )as w ell as easy engineering realizati on . Key words :cu rren t mode ,IGBT ,fu ll 2b ridge topo logy ,S M R ,converter . 近年来,随着新型电力电子器件的飞速发展, 10k W 以上的直流功率变换器已从SCR 的低频相控整流器方式发展为IGB T 的高频DC DC 开关功率变换器方式。国外的DW A 、GEC -AL STON 、AD tranz 、ABB [1] 等公司也于近年研制出各自的IGB T DC DC 充电机,主要用于高速电气化列车及地铁列车。IGB T DC DC 充电机的重量、 体积大幅度减小,性能明显改善,但要实现15k W ~200k W 的DC DC 高频开关功率变换,存在许多技术问题需要解决。下面根据30k W IGB T DC DC 充电机的研制情况,对有关技术问题进行分析研究。 1 主电路及控制方案 (1)主电路原理图 不同的DC DC 功率变换器拓扑及PWM 控制方法可以构成许多不同的主电路及控制方案[2]。根据技 术的成熟程度、工程化实现难度、装置的性能要求、系列化功率扩容考虑、长期可靠性要求等,在设计30k W IGB T DC DC 充电机时,选择了电流模式PWM 控制 的全桥拓扑(无隔直电容)功率变换器方案。功率变换器的工作频率约为20kH z 。主电路原理如图1所示。 其中C 2为母线单电容型snubber 电路,CT 为检测一次侧电流用的电流互感器。此一次侧电流信号用作电流模式PWM 反馈控制 。 图1 IGBT DC DC 充电机用功率变换器主电路原理图 (2)控制系统原理方框图 控制系统原理如图2所示。这是一个由110V 输出电压控制的电压外环及电流互感器CT 所检测的一次侧电流内环构成的双闭环反馈系统。斜坡补偿电路是电流模式PWM 控制的大占空比双端开关电源电路是为防止次谐波振荡所必需的。反馈补偿网络用以控制电压反馈闭环的稳定性。A 、B 两路驱动信号分别提供给图1中的两路对角线IGB T V 1、V 3和V 2、V 4。 1999年第5期机 车 电 传 动№5,1999 1999年9月10日EL ECTR I C DR I V E FOR LOCOM O T I V E Sep .10,1999 随着LED技术的发展,LED的应用已经从传统的小功率便携产品背光拓展至中大功率的室内照明、室外照明及手电筒等应用。根据驱动电源的不同,LED照明通常可以划分为交流-直流(AC-DC) LED照明、直流-直流(DC-DC) LED照明电源以及电池供电的LED手电筒等不同类型,LED灯具及其功率也各不相同,如3 W PAR16、3×2 W PAR20、10 W/15 W PAR30、15 W/22 W PAR38、1 W G13、3 W GU10、1 W MR11、3 W MR16、3 W/9 W/15 W嵌灯、1W-3W阅读灯等。 1,AC-DC LED照明解决方案 安森美半导体在AC-DC电源供电的LED照明应用中,提供各种离线控制器及功率因数校正(PFC)控 制器,并配合隔离及非隔离要求提供不同的LED应用方案。在交流线路电压与LED之间没有物理电气连接的隔离应用中,常见的拓扑结构有反激 (Flyback)及双电感加单电容(LLC)半桥谐振。不同拓扑结构适合于不同的功率范围或是用于满足特别的设计要求。例如, 反激拓扑结构是小于100 W的中低功率应用的标准选择,而LLC半桥拓扑结构是大功率和高能效的首选方 案。 图1:不同功率范围的隔离型拓扑结构 AC-DC LED照明应用中,小功率的LED应用通常以恒流(CC)来驱动,而恒压(CV)功能是在输出开路的情况下作为保护功能。大功率的LED应用可能需要在电路中增加功率因数校正(PFC),其中的AC-DC转换与LED驱动两部分电路既可能采用整体式(integral)配置,即两者融合在一起,均位于照明灯具内,也可以采用分布式(distributed)配置,如图2,从而简化安全考虑,并增加系统灵活性。 功率谱估计介绍 谱估计在现代信号处理中是一个很重要的课题,涉及的问题很多。在这里,结合matlab,我做一个粗略介绍。功率谱估计可以分为经典谱估计方法与现代谱估计方法。经典谱估计中最简单的就是周期图法,又分为直接法与间接法。直接法先取N点数据的傅里叶变换(即频谱),然后取频谱与其共轭的乘积,就得到功率谱的估计;间接法先计算N点样本数据的自相关函数,然后取自相关函数的傅里叶变换,即得到功率谱的估计.都可以编程实现,很简单。在matlab中,周期图法可以用函数periodogram实现。 周期图法估计出的功率谱不够精细,分辨率比较低。因此需要对周期图法进行修正,可以将信号序列x(n)分为n个不相重叠的小段,分别用周期图法进行谱估计,然后将这n段数据估计的结果的平均值作为整段数据功率谱估计的结果。还可以将信号序列x(n)重叠分段,分别计算功率谱,再计算平均值作为整段数据的功率谱估计。 种称为分段平均周期图法,一般后者比前者效果好。加窗平均周期图法是对分段平均周期图法的改进,即在数据分段后,对每段数据加一个非矩形窗进行预处理,然后在按分段平均周期图法估计功率谱。相对于分段平均周期图法,加窗平均周期图法可以减小频率泄漏,增加频峰的宽度。welch法就是利用改进的平均周期图法估计估计随机信号的功率谱,它采用信号分段重叠,加窗,FFT 等技术来计算功率谱。与周期图法比较,welch法可以改善估计谱曲线的光滑性,大大提高谱估计的分辨率。matlab中,welch法用函数psd实现。调用格式如下: [Pxx,F] = PSD(X,NFFT,Fs,WINDOW,NOVERLAP) X:输入样本数据 NFFT:FFT点数 Fs:采样率 WINDOW:窗类型 NOVERLAP,重叠长度 现代谱估计主要针对经典谱估计分辨率低和方差性不好提出的,可以极大的提高估计的分辨率和平滑性。可以分为参数模型谱估计和非参数模型谱估计。参数模型谱估计有AR模型,MA模型,ARMA模型等;非参数模型谱估计有最小方差法和MUSIC法等。由于涉及的问题太多,这里不再详述,可以参考有关资料。matlab中,现代谱估计的很多方法都可以实现。music方法用pmusic命令实现;pburg函数利用burg法实现功率谱估计;pyulear函数利用yule-walker算法实现功率谱估计等等。 另外,sptool工具箱也具有功率谱估计的功能。窗口化的操作界面很方便,而且有多种方法可以选择 在海杂波抑制的研究中,对海杂波谱分析一定要用到谱估计理论,一定得花时间学好! 能量信号的自相关函数和功率信号的自相关函数 一、 能量信号的自相关函数 相关是匹配过程,而自相关则是指延迟信号与与其自身的匹配。实值能量信号x(t)的自相关函数定义为: +∞<<∞-+= ?+∞ ∞-τττdt t x t x R x )()()( 自相关函数)(τx R 提供了信号与其平移τ时间后所得信号之间的关联程度的测度。)(τx R 不是时间的函数,而是信号与其平移信号的时间间隔τ的函数。 实值能量信号的自相关函数具有以下性质: 1. )()(ττ-=x x R R 函数关于零点对称; 2. )0()(x x R R ≤τ 函数在原点获得最大值; 3. )()(f R x x ψτ? 自相关函数与功率谱(PSD )是傅立叶变换对; 4. dt t x R x )()0(2?+∞ ∞ -= 函数在零点的值等于信号的能量。 二、功率信号的自相关函数 实值功率信号x(t)的自相关函数定义如下: +∞<<∞-+=?+-∞→τττdt t x t x T R T T T x 2/2/)()(1)(lim 当功率信号为周期为T 0的周期信号时,上式的时间平均可以用周期T 0代替,故自相关函数可以表示为: +∞<<∞-+=?+-τττdt t x t x T R T T x 2/2/000)()(1)( 实值功率信号的自相关函数与能量信号的自相关函数有类似的性质: 1. )()(ττ-=x x R R 函数关于零点对称; 2. )0()(x x R R ≤τ 函数在原点获得最大值; 3. )()(f G R x x ?τ 自相关函数与功率谱(PSD )是傅立叶变换对; 4. dt t x T R T T x )(1 )0(2 /2 /2000?+-= 函数在零点的值等于信号的功率。 数字式电液调速器的功率调节 摘要:本文分析了数字式电液调速器中功率调节模式的直接式和间接式调节结构及其实现方法,并在 此基础上描述了功率调节的适应式变参数策略及其在水电厂AGC 系统中的应用情况。 关键词:AGC 数字式电液调速器 功率调节 适应式变参数 引言 水轮机数字式电液调速器有3种主要调节模式―频率调节模式、开度调节模式、功率调节模式。 功率调节模式是在被控水轮发电机组并入电网后采用的一种调节模式,除用作运行人员手动调节机组有功功率以外,更适合与水电厂AGC (自动发电控制)系统接口并实现机组有功功率的全数字控制。 功率调节模式在工程实现中,应保证被控机组在上位系统数字功率给定的指令下,机组有功功率能单调、快速地跟踪指令值。为了满足这个动态调节过程的要求,必须考虑以下三个因素: 1 被控机组有功功率P g 与水轮机导叶开度y 之间的时间滞后,这主要是由水轮机调节系统的水流惯性时间常数Tw 、机组惯性时间常数Ta 和机组功率变送器滤波时间常数T f 等引起的。 2 被控机组有功功率P g 是机组水头H 和水轮机导叶开度y 的函数,即在不同的机组水头下,同一导叶开度对应于机组的不同有功功率(图1(a ))。 图1 P g , H, y 的关系曲线 P g P P P (a) P (b) 3在恒定水头下,机组有功功率P g与水轮机导叶开度y之间呈非线性特性(图1(b)),即在空载开度y0至某一开度y s之间,机组功率P g随着导叶开度y的变化而有较大的变化率;而在y s至最大导叶开度y max之间,除了上述变化率明显减小外,有的机组的P g=f(y)曲线还呈现上凸的关系。 1.功率调节模式 直接式和间接式功率调节结构分别见图2和图4,图中:K P, K I, K D 分别为调速器的比例、积分、和微分系数,E f,Ep和Ey分别是人工频率、功率、和开度死区,f c,P c和y c分别是频率给定、功率给定和开度给定,y PID是调速器导叶开度计算值,b p和e p分别是开度和功率的永态差值系数。其一般工作原理见文献【1】。 1.1 直接式调节结构 图2 直接式功率调节结构图 功率给定P c与机组实际功率测量值P g进行比较,经人工功率死区Ep和功率永态差值系数e p得功率调节差值ΔP,经过人工频率死区E f的频差Δf与ΔP相加得到了积分输入项,调速器进入稳态的条件是: ΔI=Δf+e p·ΔP=0 (1) 设在稳态下,调速器功率给定为P c1, 当水电厂计算机监控系统AGC以数字形式下达机组有功功率给定值P c2后,调速器即按图3的方式将微机内的Pc从P c1按两段斜率(K1功率MOS管的五种损坏模式详解
电力系统功率特性和功率极限实验
功率谱密度
功率函数信号发生器的设计
最全的功率计算公式
功率与扭矩的区别
容量和功率的区别
功率MOS管的五种损坏模式详解
电力系统功率特性和功率极限实验
低功率设计中不同功率格式的应用
功率谱和功率谱密度的区别
20170402-DC-DC功率变换器的两种工作模式
功率谱密度
30kW电流模式PWM控制的DCDC功率变换器
不同电源供电及不同功率等级的LED照明驱动器方案
功率谱估计介绍(介绍了matlab函数)
能量信号的自相关函数和功率信号的自相关函数
功率调节解读