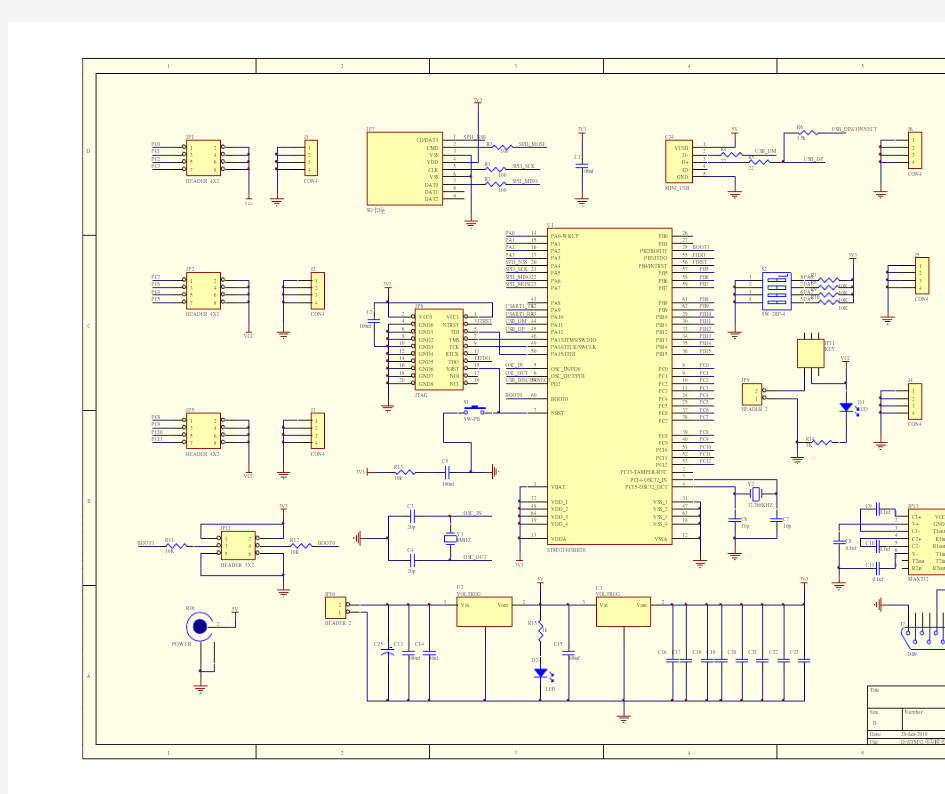
STM32舵机控制板原理图
1
2
3
4
5
6
A
B
C
D
6
54321D
C
B
A
Titl e
Number Revision
Size B Date:28-Jan-2010Sheet of File:
D:\STM 32多功能多路舵机控制板\STM 32多功能多路舵机控制板PR OTEL\STM 32舵机控制板.Ddb
Drawn B y :BOOT060NR ST
7
OS C_IN/PD0
5
OS C_OUT/PD1
6
PA0-WKUP 14
PA115PA216PA317PA420PA521PA622PA7
23PA841
PA942PA1043PA1144PA12
45
PA13/JTMS/S WDIO 46PA14/JTCK/S WCLK 49PA15/JTDI
50
PB 026PB 1
27
PB 2/BOOT128PB 3/JTDO 55PB 4/JNTRST
56PB 557PB 658PB 7
59PB 861PB 962PB 1029PB 1130PB 1233PB 1334PB 1435PB 1536PC 08PC 19PC 210PC 311PC 424PC 525PC 637PC 7
38PC 839PC 940PC 1051PC 1152PC 12
53PC 13-TAMPER-RTC
2PC 14-OS C32_IN 3PC 15-OS C32_OUT
4PD254VB AT 1VDD_132VDD_248VDD_364VDD_419VDDA 13
VS S_131VS S_247VS S_363VS S_418VS SA
12
U1
STM 32F 103RB T6
CD/DAT3
1CM D 2VS S 3VDD 4CLK 5VS S 6DAT07DAT18DAT2
9
JP7
SD 卡座
A 1
1A 2A 23
B 16B 5B 2
4
JP11KEY
C1+
1
V+2C1-3C2+4
C2-5
V-6
T2out 7
R2i n 8VC C 16
GND 15T1out 14R1i n 13R1out 12T1i n 11T2i n 10R2out
9
JP13MAX232
1
62738495J7
DB 9
Y18M HZ
C3
20p
C4
20p
OS C_IN
OS C_OUT
US ART1_TX US ART1_RX C9
0.1uf C110.1uf
C100.1uf C80.1uf
C12
0.1uf 1
234J5CON4
1234J6CON4
1
234J4CON4
1234567
8
JP4HEADER 4X2
1234567
8
JP6HEADER 4X2
1234567
8
JP3HEADER 4X2
1234567
8
JP1
HEADER 4X2
1234567
8
JP2
HEADER 4X2
1234567
8
JP5
HEADER 4X2
1234J1CON4
1234J2CON4
1234J3CON4
vcc
VC C
VC C
VC C
VC C
VC C
5V
VC C02VC C11
GND04NTRST 3GND16TDI 5GND28TM S 7GND310TC K 9GND412RTCK 11GND514TDO 13GND616NR ST 15GND718NC 017GND820
NC 1
19
JP8JTAG
3V3
JTR ST JTDO JTR ST JTDO R1310k
C5
100nf 3V3
S1
SW-PB
SPI1_NS S SPI1_SC K SPI1_MISO SPI1_MOSI SPI1_NS S
R3
100R1100R2
100
SPI1_MOSI
SPI1_SC K SPI1_MISO C2100nf
3V3
3V3
C1100nf
OS C_IN OS C_OUT US ART1_TX US ART1_RX 12345
6
JP12
HEADER 3X2
3V3R1210K
R1110K
BOOT1
BOOT0
BOOT0
BOOT11234
8765S2SW DIP-4
3V3
R710K R810K R910K R1010K
PA0PA1PA2PA3
PA0PA1PA2PA33V3
C610p
C710p
US B_DM US B_DP US B_DISCONNEC T
PC 0PC 1PC 2PC 3
PC 7PC 6PC 4PC 5
PC 8PC 9PC 10PC 11
PC 12PB 5PB 6PB 7PB 8
PB 11PB 10PB 9PB 12
PB 13PB 14PB 15
PB 5PB 6PB 7PB 8PB 9PB 10PB 11PB 12PB 13PB 14PB 15PC 0PC 1PC 2PC 3PC 4PC 5PC 6PC 7PC 8PC 9PC 10PC 11PC 12
VUSB 1GND 5
ID 4D+3D-2C24
MINI_USB
5V
R422
R522R61.5k
US B_DM
US B_DP
US B_DISCONNEC T Y2
32.768KHZ R15
1k
5V
2
3
1
R16
POWER
5V
1
2JP10
HEADER 212JP9
HEADER 2
VC C
3V3
C13100nf
C1410uf
C15
100nf
C1647u f
C17
100n f
C184.7u f
C19100n f
C20100n f
C21100n f
C22100n f
C23
100n f
R141K
+C251000u f
Vin 3
G N D
1
Vout
2U2
VOLTREG
Vin 3
G N D
1
Vout
2
U3
VOLTREG
D2
LED
D1LED
51单片机程序:按键控制舵机角度
#include "reg52.h" unsigned char count; //0.5ms次数标识 sbit pwm =P2^7 ; //PWM信号输出 sbit jia =P2^4; //角度增加按键检测IO口 sbit jan =P2^5; //角度减少按键检测IO口 unsigned char jd=5; //角度标识 void delay(unsigned char i)//延时 { unsigned char j,k; for(j=i;j>0;j--) for(k=125;k>0;k--); } void Time0_Init() //定时器初始化 { TMOD = 0x01; //定时器0工作在方式1 IE = 0x82; TH0 = 0xfe; TL0 = 0x33; //11.0592MZ晶振,0.5ms TR0=1; //定时器开始 } void Time0_Int() interrupt 1 //中断程序 { TH0 = 0xfe; //重新赋值 TL0 = 0x33; if(count< jd) //判断0.5ms次数是否小于角度标识 pwm=1; //确实小于,PWM输出高电平 else pwm=0; //大于则输出低电平 count=(count+1); //0.5ms次数加1 count=count%40; //次数始终保持为40 即保持周期为20ms } void keyscan() //按键扫描 { if(jia==0) //角度增加按键是否按下 { delay(10); //按下延时,消抖 if(jia==0) //确实按下 { jd++; //角度标识加1 count=0; //按键按下则20ms周期从新开始 if(jd==6) jd=5; //已经是180度,则保持 while(jia==0); //等待按键放开
舵机知识
DIYer修炼:舵机知识扫盲 双向电梯 ? 1 简介 ? 2 舵机的结构和原理 ? 3 选择舵机 ? 4 舵机的支架和连接装置 ? 5 如何控制舵机 ? 6 舵机应用:云台网络摄像头 ?7 如何DIY连续旋转的舵机 ?8 连续旋转舵机的应用:5分钟的绘图机器人 1 简介 舵机控制的机器人 ● 我猜你肯定在机器人和电动玩具中见到过这个小东西,至少也听到过它转起来时那与众不同的“吱吱吱”的叫声。对,它就是遥控舵机,常用在机器人技术、电影效果制作和木偶控制当中,不过让人大跌眼镜的是,它竟是为控制玩具汽车
和飞机才设计的。 ● 舵机的旋转不像普通电机那样只是古板的转圈圈,它可以根据你的指令旋转到0至180度之间的任意角度然后精准的停下来。如果你想让某个东西按你的想法运动,舵机可是个不错的选择,它控制方便、最易实现,而且种类繁多,总能有一款适合你呦。 ● 用不着太复杂的改动,舵机就可摇身一变成为一个高性能的、数字控制的、并且可调速的齿轮电机。在这篇文章中,我会介绍舵机使用的的一些基础知识以及怎样制作一个连续运转舵机。 2 舵机的结构和原理
A.标准舵机图解 ● 遥控舵机(或简称舵机)是个糅合了多项技术的科技结晶体,它由直流电机、减速齿轮组、传感器和控制电路组成,是一套自动控制装置,神马叫自动控制呢?所谓自动控制就是用一个闭环反馈控制回路不断校正输出的偏差,使系统的输出保持恒定。我们在生活中常见的恒温加热系统就是自动控制装置的一个范例,其利用温度传感器检测温度,将温度作为反馈量,利用加热元件提输出,当温度低
于设定值时,加热器启动,温度达到设定值时,加热器关闭,这样不就使温度始终保持恒定了吗。 B.闭环反馈控制 ● 对于舵机而言呢,位置检测器是它的输入传感器,舵机转动的位置一变,位置检测器的电阻值就会跟着变。通过控制电路读取该电阻值的大小,就能根据阻
舵机工作原理
控制思想 该模块的程序框图如图4.5 所示。车模在行驶过程中不断采样赛道信息,并通过分析车模与赛道相对位置判断车模所处赛道路况,是弯道还是直道,弯道时是左转还是右转。直道时小车舵机状态保持不变,弯道时左转或右转,计算转弯半径。我们所用舵机的标准PWM 周期为20ms,转动角度最大为左右90度,PWM调制波如图7.2所示。
当给舵机输入脉宽为0.5ms,即占空比为0.5/20=2.5%的调制波时,舵机右转90度;当给舵机输入脉宽为1.5ms,即占空比为1.5/20=7.5%的调制波时,舵机静止不动;当给舵机输入脉宽为2.5ms,即占空比为2.5/20=12.5%的调制波时,舵机左转90度。可以推导出舵机转动角度与脉冲宽度的关系计算公式为: 注:其中t为正脉冲宽度(ms);θ为转动角度;当左转时取加法计算,右转时取减法计算结果。 当我们根据赛道弯度计算出转动角度以后便可以根据舵机的参数计算出脉冲宽度,控制舵机转动,舵机转角与PWM脉宽关系如表4-1所示。
在具体操作中PWM调制波的周期可以设置在20ms左右一定范围内,比如设置为10ms 或是30ms均可以使舵机正常转动,但是设置周期较长时,系统延迟时间较多,舵机转向会出现滞后,导致赛车冲出跑道;设置周期如果过短,系统输出PWM 调制波不稳定,舵机转动也会受影响,不能实现赛车的精确转向。经过反复测试,最终把输出PWM 调制波周期设定为13ms (用计数器实现)。 运行电机的转速以及舵机的转角,在软件上都是通过对PWM 波占空比进行设置来相应控制的。前面提到,舵机转角控制需要将两个
八位寄存器合成为一个十六位寄存器。程序中的舵机位置信号,当PWM调制波周期设为13ms时,因为总线频率为24MHz,用时钟SB,可计算得到16进制参数为9870H,舵机中间位置时占空比16进制参数为1680H,要分配给PWM6和7,分配时这2个端口的赋值必须是16进制,那么PWM模块初始化赋值为 PWMPER6= 0x98,PWMPER7= 0x70,PWMDTY6= 0x16,PWMDTY7= 0x80,因此这就牵涉到如何将1个十进制数分配为2个十六进制数问题。有2种方案,一种是除法取余,另一种是移位操作,前者编译生成的代码比后者要多,所以采用移位操作来实现,即取高位时与0xFF00先作“&”计算,然后将所得到的数向右移8位(>>8),即可取得高8位;同理,取低8位时只要与0x00FF作“&”计算即可(算法)。 2、结构和控制 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。 工作原理:控制电路板接受来自信号线的控制信号(具体信号待会再讲),控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。
舵机原理
1、概述 舵机最早出现在航模运动中。在航空模型中,飞行机的飞行姿态是通过调节发动机和各个控制舵面来实现的。举个简单的四通飞机来说,飞机上有以下几个地方需要控制: 1) 发动机进气量,来控制发动机的拉力(或推力); 2) 副翼舵面(安装在飞机机翼后缘),用来控制飞机的横 滚运动; 3) 水平尾舵面,用来控制飞机的俯仰角; 4) 垂直尾舵面,用来控制飞机的偏航角; 不仅在航模飞机中,在其他的模型运动中都可以看到它的应用:船模上用来控制尾舵,车模中用来转向等等。由此可见,凡是需要操 作性动作时都可以用舵机来实现。 2、结构和控制 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。
工作原理:控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。 舵机的基本结构是这样,但实现起来有很多种。例如电机就有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。例如,其中小舵机一般称作微舵,同种材料的条件下是中型的一倍多,金属齿轮是塑料齿轮的一倍多。需要根据需要选用不同类型。 舵机的输入线共有三条,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有两种规格,一是4.8V,一是6.0V,分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而
飞鸿16路舵机控制器使用说明书
FH24路舵机控制器使用说明书 飞鸿科技 2012-5-24 一、产品介绍 (1) 二、功能特点 (3) 三、接口说明 (4) 四、指令说明 (6) 五、16路舵机调试软件使用说明 (7) 二、连接PC上位机 (9) 三、上位机界面编辑 (10) 四、单路舵机调试 (11) 五、动作组编辑 (12) 六、注意事项及故障解决 (13) 产品介绍 一、 一、产品介绍 设计该舵机控制板是为了方便新手学习多路舵机的控制。多路舵机控制并不很复杂,但至今网上关于多路舵机控制的资源很少,当前淘宝上的舵机控制板也都不提供程序代码。由于这些原因,大批的机器人爱好者不能掌握多路舵机控制。使得很多机器人爱好者停滞不前,在这些最基本的地方浪费大量时间,不能不精力放到更高层的机器人控制方面的研究。如果每个人
都从头做起,整体的进步必将非常的缓慢。别人做好的东西我们不妨拿来学习,这样要节省很多的时间与精力。在这个基础上继续前进,做出属于自己的更高级的机器人。 由于本人在这些基础的东西上耗费的大量的精力,导致我没有时间去做高级的控制,如自平衡,语音识别等。大学接近尾声,没能让自己的机器人进一步升级感到非常遗憾。 基于方便学习的原则,本板子的设计有一下几个特点: 1、选用大家熟悉的,容易掌握的51单片机。但不是普通51单片机,是功能强大的增强型单片机STC12C5A60S2。 有人说51控制的精度肯定不如ARM。是的,这是明显的事实。但是我用ARM的芯片来写教程,只能给少数人看,而且如果那个人ARM掌握的都很好了,也不需要看此教程了。该控制板设计的目的就是给机器人初级爱好者学习,仅仅因为这一点,选择51单片机是最恰当不过了。 我最初做的32路舵机控制板就是在arm芯片上做的,那些不适合新手学习,在51上学会了舵机控制的基本方法,等你会使用更高级单片机的时候可以很容易的移植到上面,实现更多舵机,更高精度的控制。 STC12C5A60S2单片机属于增强型51。他兼容传统的51单片机,也就是说,你原来的学习的、编写的51程序不用改动就能在这个单片机上直接使用,不会出现问题,而且速度提高8~12倍。但是它与传统51相比,在速度性能与资源方面都有了很大的提升。 (1)60K的flash程序存储器。89C52只有8K。 (2)1280字节的SRAM。你课本上学的RAM只有128字节。1280足够用了,省去外部扩展的麻烦。 (3)两个串口。 (4)独立波特率发生器。做机器人定时器往往很不够用,而传统51单片机串口通信还要占用定时器,有了独立波特率发生器就可以节省出一个定时器。 (5)PCA模块。可以硬件输出快速PWM。可以扩展出两个定时器。 (6)8路A/D转换通道。A/D转换在机器人、各种比赛中都很常用,使用这款单片机就不必再做AD转换电路。 2、程序下载接口、IO口引出。该板是单片机最小系统板+16路舵机控制板。不是单纯的舵机控制板,而是一款可以用来学习、编程、二次开发的开发板。可以直接用来参加比赛,DIY,毕业设计。 5、详细的教程,丰富的资料。该板子是淘宝中唯一提供程序代码、可以学习的舵机控制板。提供原理图、接口示意图、程序代码、上位机软件。另外购买该产品赠送本人搜集的单片机开发常用工具软件,机器人资料,单片机视频教程以及丰富的例程。
单片机程序按键控制舵机角度
#i n c l u d e"r e g52.h" unsigned char count; //0.5ms次数标识 sbit pwm =P2^7 ; //PWM信号输出 sbit jia =P2^4; //角度增加按键检测IO口 sbit jan =P2^5; //角度减少按键检测IO口 unsigned char jd=5; //角度标识 void delay(unsigned char i)//延时 { unsigned char j,k; for(j=i;j>0;j--) for(k=125;k>0;k--); } void Time0_Init() //定时器初始化 { TMOD = 0x01; //定时器0工作在方式1 IE = 0x82; TH0 = 0xfe; TL0 = 0x33; //11.0592MZ晶振,0.5ms TR0=1; //定时器开始 } void Time0_Int() interrupt 1 //中断程序 {
TH0 = 0xfe; //重新赋值 TL0 = 0x33; if(count< jd) //判断0.5ms次数是否小于角度标识 pwm=1; //确实小于,PWM输出高电平 else pwm=0; //大于则输出低电平 count=(count+1); //0.5ms次数加1 count=count%40; //次数始终保持为40 即保持周期为20ms } void keyscan() //按键扫描 { if(jia==0) //角度增加按键是否按下 { delay(10); //按下延时,消抖 if(jia==0) //确实按下 { jd++; //角度标识加1 count=0; //按键按下则20ms周期从新开始 if(jd==6) jd=5; //已经是180度,则保持 while(jia==0); //等待按键放开 }
航模舵机控制原理详解
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。 其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 3. 舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms 范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的: 0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 这只是一种参考数值,具体的参数,请参见舵机的技术参数。 小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。 要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有
舵机及舵机的控制
舵机及舵机的控制 1.什么是舵机: 在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。 还是看看具体的实物比较过瘾一点: 2.其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 3.舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为 0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关 系是这样的:
0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 请看下形象描述吧: 这只是一种参考数值,具体的参数,请参见舵机的技术参数。 小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。 要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有关了。一些前辈喜欢用555来调舵机的驱动脉冲,如果只是控制几个点位置伺服好像是可以这么做的,可以多用几个开关引些电阻出来调占空比,这么做简单吗,应该不会啦,调试应该是非常麻烦而且运行也不一定可靠的。其实主要还是他那个年代,单片机这东西不流行呀,哪里会哟! 使用传统单片机控制舵机的方案也有很多,多是利用定时器和中断的方式来完成控制的,这样的方式控制1个舵机还是相当有效的,但是随着舵机数量的增加,也许控制起来就没有那么方便而且可以达到约2微秒的脉宽控制精度了。听说AVR也有控制32个舵机的试验板,不过精度能不能达到2微秒可能还是要泰克才知道了。其实测试起来很简单,你只需要将其控制信号与示波器连接,然后让试验板输出的舵机控制信号以2微秒的宽度递增。
51控制舵机程序大全
#include
#include
舵机及转向控制原理
舵机及转向控制原理 令狐采学 1、概述 2、舵机的组成 3、舵机工作原理 4、舵机选购 5、舵机使用中应注意的事项 6、辉盛S90舵机简介 7、如何利用程序实现转向 8、51单片机舵机测试程序 1、概述 舵机也叫伺服电机,最早用于船舶上实现其转向功能,由于可以通过程序连续控制其转角,因而被广泛应用智能小车以
实现转向以及机器人各类关节运动中,如图1、图2所示。 令狐采学创作 图1舵机用于机器人 图2舵机用于智能小车中 舵机是小车转向的控制机构,具有体积小、力矩大、外部机械设计简单、稳定性高等特点,无论是在硬件设计还是软件设计,舵机设计是小车控制部分重要的组成部分,图3为舵机的外形图。 图3舵机外形图 2、舵机的组成 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿 轮组、位置反馈电位计、直流电机、控制电路等,如图4、图5所示。 图4舵机的组成示意图 图5舵机组成
舵机的输入线共有三条,如图6所示,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有两种规格,一是4.8V, —令狐采学创作是6.0V,分别对应不同的转矩标准,即输出力矩不 同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而不是中间,需要辨认。但记住红色为电源,黑色为地线,一般不会搞错。 图6舵机的输出线 3、舵机工作原理 控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。其工作流程为:控制信号一控制电路板―电机转动-齿轮组减速-舵盘转动?位置反馈电位计-控制电路板反馈。
舵机控制C程序
舵机控制C程序 #include
舵机控制板使用说明(中文)
舵机控制板使用说明V1.2 产品特点 ●采用32位ARM 内核的处理器芯片 ●独创的在线升级机制,用户可以在线升级固件 ●自动识别波特率 ●采用USB和UART通讯接口 ●1us的控制精度(相当于舵机的0.09度) ●可以同时同步控制32个舵机(24路舵机控制板可以同时同步控制24个,16路舵机控制板可以同时 同步控制16个舵机) ●内置512K 存储芯片,可存储上百个动作组 ●功能强大的电脑软件(内置3种语言,简体中文、繁体中文、英语) ●拥有Android手机控制软件 供电 舵机控制板需要2个电源: 舵机电源和芯片电源 舵机电源(正极):VS(图中3号位置的蓝色接线端子的左端) 舵机电源(负极):GND(图中3号位置的蓝色接线端子的中间) 舵机电源的参数根据实际所接舵机的参数而定,如TR213舵机的供电电压是4.8-7.2V,那么舵机电源就可以用电压在4.8-7.2V之间的电源。 芯片电源(正极):VSS(图中3号位置的蓝色接线端子的右端)
芯片电源(负极):GND(图中3号位置的蓝色接线端子的中间) VSS的要求是6.5-12V,如果芯片供电是从VSS端口输入的,那么电源的电压必须是6.5-12V之间。 另外: 1. 图中2号位置的USB接口可以给芯片供电,所以USB接口和VSS端口,任选其一即可。 2. 图中1号位置也可以给芯片供电,标记为5V和GND,5V是正极,GND是负极,供电电源的电压必 须是5V。 3. 图中1、2、3号位置都可以给芯片供电,任选其一即可。 4. 图中4号位置的绿色LED灯是芯片电源正常的指示灯,绿色灯亮,表示芯片供电正常,绿色灯灭,表 示芯片供电异常。 5. 图中5号位置的绿色LED灯是舵机电源正常的指示灯,绿色灯亮,表示舵机供电正常,绿色灯灭,表 示舵机供电异常。 如果需要控制舵机,2个绿色的LED灯都亮是前提条件。
单片机按键控制舵机转动
相关文档
- stm32f103开发板原理图分析
- 智嵌 STM32F407开发板(基本型)原理图V1.0
- 野火stm32开发板原理图
- 奋斗STM32开发板V5原理图
- STM32开发板介绍
- STM32 开发板的介绍
- STM32F103RBT6开发板原理图
- STM32F103RC核心开发板原理图
- 奋斗STM32开发板V5原理图
- STM32F103ZET6开发板原理图(第5版)
- STM32F103VCT6开发板原理图
- stm32开发板原理图
- 战舰STM32开发板原理图3(共7份)
- 正点原子mini版01MiniSTM32开发板V3光盘结构(必读)
- STM32F107开发板原理图(功能完整)
- STM32F407开发板原理图
- 芯嵌stm32开发板原理图V3.0版本
- STM32原理图开发板
- 野火stm32开发板原理图 - 副本
- ALIENTEK MiniSTM32开发板原理图