运用PLC技术改造Z3040型摇臂钻床

引言
钻床是一种孔加工设备,可以用来钻孔、扩孔、铰孔、攻丝及修刮端面等多种形式的加工。 Z3040摇臂钻床是一种立式钻床,他具有性能完善、适用范围广、操作方便、灵活等优点,它适用于单件或批量生产带有多孔的大型零件的孔加工,是一般机械加工车间常用的机床,在机械行业中得到了广泛应用。目前机械行业中使用的摇臂钻床其控制系统大多数是采用继电器接触器控制方式,电路接线复杂触点多、噪音大、维修工作量大。因此,对Z3040摇臂钻床控制系统的技术改造是非常必要的。
本设计的主要任务是应用可编程控制器(PLC)对Z3040摇臂钻床控制系统加以改造,最终要达到使控制系统满足Z3040摇臂钻床对电力拖动和控制要求,简化控制线路,提高系统可靠性,使用率。具体设计任务要求如下
1.Z3040型摇臂钻床控制线路原理分析
2.基于PLC的Z3040型摇臂钻床控制系统设计
(1)PLC的硬件选型
(2)Z3040型摇臂钻床PLC控制I/O端口分配表
(3)Z3040型摇臂钻床PLC控制系统电路
(4)Z3040型摇臂钻床PLC控制软件设计
(5)PLC 控制分析
3.主要电气元件及选择
(1)断路器
(2)接触器
(3)热继电器
(4)熔断器
4.元器件布置图和接线图设计
1PLC的概述
PLC的基本知识
1、PLC的产生及发展
可编程控制器(Programmable Logic Controller)简称PLC或PC:是从早期的继电器逻辑控制系统发展而来:它不断吸收微计算机技术使之功能不断增强:逐渐适合复杂的控制任务。
在工业生产过程中:大量的开关量顺序控制:它按照逻辑条件进行顺序动作:并按照逻辑关系进行连锁保护动作的控制:及大量离散量的数据采集。传统上:这些功能是通过气动或电气控制系统来实现的。
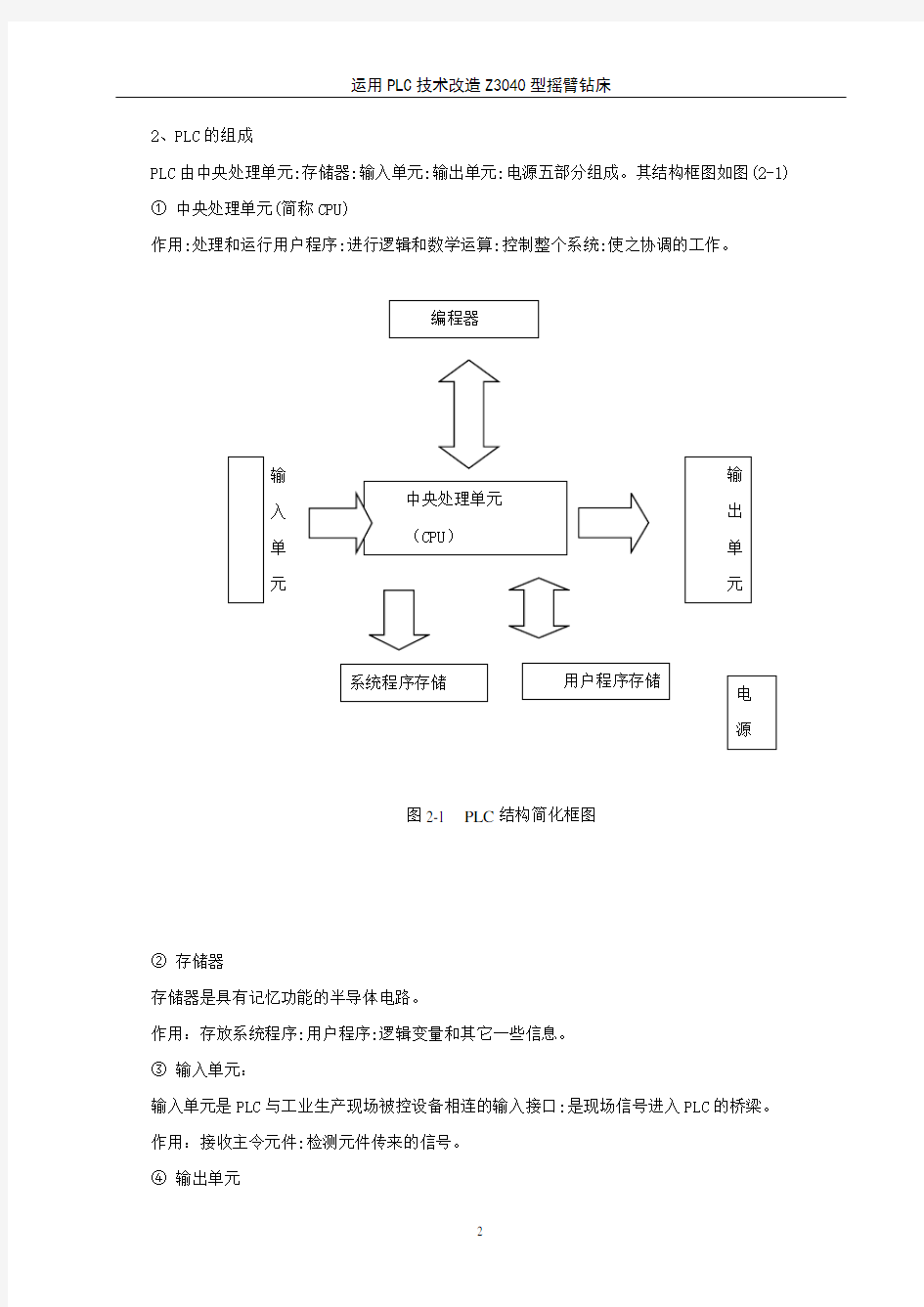
2、PLC 的组成
PLC 由中央处理单元:存储器:输入单元:输出单元:电源五部分组成。其结构框图如图(2-1) ① 中央处理单元(简称CPU)
作用:处理和运行用户程序:进行逻辑和数学运算:控制整个系统:使之协调的工作。
② 存储器
存储器是具有记忆功能的半导体电路。
作用:存放系统程序:用户程序:逻辑变量和其它一些信息。 ③ 输入单元:
输入单元是PLC 与工业生产现场被控设备相连的输入接口:是现场信号进入PLC 的桥梁。 作用:接收主令元件:检测元件传来的信号。 ④ 输出单元
输入单元
图2-1 PLC 结构简化框图
输出单元也是PLC与现场设备之间的连接部件:把输出信号送给控制对象的输出接口。
作用 将中央处理器送出的弱电信号转换成现场需要的电平信号:驱动被控设备的执行元件。
⑤电源
作用:将交流电转换成PLC内部所需的直流电源。
类型:目前大部分PLC采用开关式稳压电源供电。
3、PLC的工作原理
PLC以微处理器为核心, PLC采用循环扫描的工作方式。对每个程序:CPU
从第一条指令开始执行,按指令步序号做周期性的程序循环扫描,如果无跳转指
令,则从第一条指令开始逐条执行用户程序:直至遇到结束符后又返回第一条指
令,如此周而复始不断循环,每一个循环称为一个扫描周期。扫描周期的长短主
要取决于以下几个因素:一是CPU执行指令的速度;二是执行每条指令占用的时
间;三是程序中指令条数的多少。一个扫描周期主要可分为:输入刷新,程序执
行,输出刷新三个阶段。
4、 PLC的特点
为适应工业环境使用:与一般控制装置相比较:PLC机有以下特点:
1.可靠性高,抗干扰能力强。
2.通用性强,控制程序可变:使用方便。
3.功能强,适应面广
4.编程简单,容易掌握
5.减少了控制系统的设计及施工的工作量
6.体积小、重量轻、功耗低、维护方便
2 Z3040控制线路原理分析
2.1 Z3040摇臂钻床简介
钻床可以进行多种形式的加工,如:钻孔、镗孔、铰孔及攻螺纹。因此要求钻床的主轴运动和进给运动有较宽的调速范围。Z3040型摇臂钻床的主轴的调速
范围为50:1,正转最低转速为40 r/min,最高为2000 r/min,进给范围为0.05~1.60 r/min。它的调速是通过三相交流异步电动机和变速箱来实现的。也有的是采用多速异步电动机拖动,这样可以简化变速机构。摇臂钻床适合于在大、中型零件上进行钻孔、扩孔、铰孔及攻螺纹等工作,在具有工艺装备的条件下还可以进行镗孔。摇臂钻床的主轴旋转运动和进给运动由一台交流异步电动机拖动,主轴的正反向旋转运动是通过机械转换实现的。故主电动机只有一个旋转方向。摇臂钻床除了主轴的旋转和
进给运动外,还有摇臂的上升、下降及立柱的夹紧和放松。摇臂的上升、下降由一台交流异步电动机拖动,主轴箱、立柱的夹紧和放松由另一台交流电动机拖动。通过电动机拖动一台齿轮泵,供给夹紧装置所需要的压力油。而摇臂的回转和主轴箱的左右移动通常采用手动。此外还有一台冷却泵电动机对加工的刀具进行冷却。
2.1.1 Z3040摇臂钻床的结构及运行
Z3040摇臂钻床主要由底座、内立柱、外立柱、摇臂、主轴箱、工作台等部分组成,内立柱固定在底座上,在它的外面套着空心的外立柱,外立柱可饶着内立柱回转。主轴箱是一个复合部件,它包括主轴及主轴旋转和进给运动的全部传动变速和操作机构。主轴箱安装于摇臂的水平导轨上,可以通过手轮操作使其在水平导轨上沿摇臂移动。钻削加工时,主轴箱可由夹紧装置将其固定在摇臂的水平导轨上,外立柱紧固在内立柱上,摇臂紧固在外立柱上,然后进行钻削加工。
2.1.2 Z3040摇臂钻床的电力拖动的特点和控制要求
摇臂钻床运动部件较多,为简化传动装置,采用多台电动机控制,通常没有主轴电动机、遥臂升降电动机、立柱夹紧和放松电动机及冷却泵电动机。摇臂钻床为适应各种形式加工,要求主轴及进给有较大的调速范围。主轴一般速度下的钻床加工为恒功率负载,而低速是用于扩孔、绞孔及螺纹加工,属于恒转矩负载。摇臂钻床的主运动与进给运动皆为主轴运动,这两个运动由一台主轴电动机拖动,分别经主轴和进给传动机构实现主轴旋转和进给。主轴变速机构与进给变速机构均装在主轴箱内。
为加工螺,主轴要求有正、反转,一般由机械方法获得,为此主轴电动机只需单方向旋转。摇臂的升降由升降电动机拖动,要求电动机能正、反转。摇臂的夹紧和放松是由电气和液压联合控制,并且有夹紧和放松指示。内外立柱的夹紧与放松,主轴箱与摇臂的夹紧与放松可采用手柄机械操作、电气-液压-机械装置等方法来实现。钻削加工时.需要对刀具和工件进行冷却,为此需冷却泵电动机输送冷却液。要有必要的限位、连锁和过载保护,且具有局部安全照明。
2.1.3 Z3040控制线路概述
Z3040摇臂钻床主要有两种主要运动和其他辅助运动,主运动是指主轴带动钻头的旋转运动;进给运动是指钻头的垂直运动;辅助运动是指主轴箱沿摇臂水平运动,摇臂沿外立柱上下移动以及摇臂和外立柱一起相对于内立柱的回转运动。 Z3040摇臂钻床具有两套液压控制系统:一套是由主轴电动机拖动齿轮泵送出压力油,通过操纵机构实现主轴正反转、停车控制、空挡、预选与变速;另一套是由液压电动机拖动液压泵送出压力油来实现摇臂的夹紧和松开、主轴箱的夹紧与松开、立柱的夹紧与松开。前
者安装在主轴箱内,后者安装在摇臂电器盒下部。
1:操纵机构液压系统
该系统压力油由主轴电动机拖动齿轮泵送出,由主轴操作手柄来改变两个操纵阀的相互位置,获得不同的动作。操作手柄有五个空间位置:上、下、里、外和中间位置,其中上为“空挡”,下为“变速”,外为“正转”,里为“反转”,中间位置为“停车”。而主轴转速及主轴进给量各有一个旋钮预选.然后在操作主轴手柄。
主轴旋转时,首先按下主轴电动机起动按钮,主轴电动机起动旋转,拖动齿轮泵,送出压力油。然后操纵主轴手柄,板至所需转向位置(里或外),于是两个操纵阀相互位置转变,使一股压力油将制动摩擦离合器松开,为主轴旋转创造条件;另一股压力油压紧正转(反转)摩擦离合器,接通主轴电动机的主轴的传送链.驱动主轴正转或反转。
在主轴正转或反转过程中,可转动变速按钮,改变主轴转速或主轴进给量。主轴停车时,将操作手柄扳回中间位置,这时主轴电动机仍拖动齿轮泵旋转。但此时整个液压系统为低压油,无法松开制动摩擦离合器,而在制动弹簧作用下将动摩擦离合器压紧,使制动轴上的齿轮不能转动,实现主轴停车。所以主轴停车时主轴发动机仍在旋转,只是不能将动力传到主轴。
主轴变速与进给变速,将主轴手柄扳至“变速”位置,于是改变两个操纵阀的相互位置,使齿轮泵送出的压力油进入主轴转速预选阀和主轴进给量预选阀,然后进入各变速油缸。与此同时,另一油路系统推动拔叉缓慢运动,逐渐压紧主轴正转摩擦离合器,接通主轴电动机到主轴的传动链,带动主轴缓慢旋转.称为缓,以利于齿轮的顺利啮合。当变速完成,松开操作手柄,此时手柄在弹簧作用下由“变速”位置自动复位到主轴“停车”位置,然后在操纵主轴正转或反转,主轴将在新的转速或进给量下工作。2:夹紧机构液压系统
主轴箱、内外立柱和摇臂的夹紧和松开是由液压泵电动机拖动液压泵电动机送出压力油,推动活塞、菱形块来实现的。其中由一个油路控制主轴箱和立柱的夹紧,另一油路控制摇臂的夹紧和松开,这两个油路均由电磁阀控制。
Z3040摇臂钻床共有四台电动机:主电动机M1,摇臂升降电动机M2,液压泵电动机M3和冷却泵电动机M4。
2.2 Z3040控制线路原理分析
Z3040型摇臂钻床控制线路原理图如下图所示,Z3040型摇臂钻床的动作是通过机、电、液进行联合控制实现的。该机床控制电路采用380V/100V隔离变压器供电,但其二次绕组增设24V安全电压供局
部照明使用。
断路器QF1既作为机床线路的电源总开关,又作为机床线路和主轴电机M1的短路及过载保护元件,断路器QF2为摇臂升降电动机M2、液压泵电机M3、冷却泵电机M4的隔离开关和过载及短路保护元件。QF3、QF4、QF5分别为机床控制电路、机床工作信号指示电路和机床工作照明电路和过载及短路保护开关。
开车前的准备。首先将隔离开关接通,将电源引入开关QF1扳到“接通”位置,接通三相交流电源,此时总电源指示灯HL1亮,表示机床电气电路进入带电状态。按下总启动按钮SB1,中间继电器KA线圈通电吸合并自锁,为主电动机及其他电动机启动多准备,同时触点KA闭合,为其他三个指示灯通电做准备。
图3-1 Z3040型摇臂钻床控制线路原理图
2.2.1 主电路分析
1.M1为单方向旋转,由接触器KM1控制,主轴的正反转则由机床液压系统操纵配合正反转摩擦离合器实现,并由热继电器FR1作电动机长期过载保护。
2. M2由正、反转接触器KM2、KM3控制实现正反转。控制电路保证,在操纵摇臂升降时,首先使液压泵电动机起动旋转,供出压力油,经液压系统将摇臂松开,然后才使电动机M2 起动,拖动摇臂上升或下降。当移动到位后,保证M2先停下,再自动通过液压系统将摇臂夹紧,最后液才下。M2为短时工作,不设长期过载保护。
3.M3由接触器KM4、KM5实现正反转控制,并有热继电器FR2作长期过载保护。
4.M4电机容量小,仅0.125kW,由开关QS 控制。
2.2.2 控制电路分析
由变压器TC 将380V 交流电压降为110V,作为控制电源。指示灯电源为 6V 。
1.主电动机控制 按下起动按钮SB2,接触器KM1吸合并自锁,主轴电动机M1起动并运转。按下停止按钮SB8,接触器KM1释放,主轴电动机M1停转。
2.摇臂升降控制 摇臂上升、下降分别由SB3、SB4点动控制。 按上升按钮SB3,时间继电器KT1得电吸合,瞬时动合触点(33-35)闭合,接触器KM4得电吸合,液压泵电动机M3接通电源正向旋转,供给压力油。压力油经分配阀体进入摇臂松开的油腔,推动活塞,使摇臂松开。当摇臂完全松开后,活塞杆通过弹簧片压下限位开关ST2,使其动断触点ST2(17-33)断开,使接触器KM4线圈断电释放,液压泵电动机M3停转,与此同时,另一动合触点ST2(17-21)闭合,接触器KM2线圈通电吸合,其主触点接通升降电动机M2的电源,M2启动正向旋转,带动摇臂上升。 如果摇臂没有松开,ST2的动合触点也不能闭合,KM2就不能吸合,M2不能旋转,摇臂也就不可能上升,保证了只有在摇臂可靠松开后才能使摇臂上升。 当摇臂上升到所需位置时,松开按钮SB3,接触器KM2和时间继电器KT1同时断电释放,摇臂升降电动机M2停转,摇臂停止上升。由于KT1释放,其延时闭合的动断触点(47-49)经1-3秒延时后闭合,接触器KM5的线圈经(1-3-5-7-47-49-51-6-2)线路通电吸合,液压电动机M3反向起动旋转,供给压力油。压力油经分配阀进入摇臂夹紧油腔,向相反方向推动活塞,使摇臂夹紧。同时,活塞杆通过弹簧片压下限位开关ST2动断触点(7-47)断开,接触器KM5断电释放,液压泵电动机M3停止旋转,完成了摇臂的松开,上升,夹紧动作。
摇臂上升的动作过程如下:
SB3→﹛ ﹜→M3正转→压下ST2→﹛ ﹜摇臂上升到预定位置,松来SB3. 摇臂的下降过程与上升基本相同,它们的夹紧和放松电路完全一样。所不同的是按下降按钮SB4时为KM3线圈得电,摇臂升降电动机M2反转,带动摇臂下降。时间继电器KT1的作用是控制KM5的吸合时间,使
KTI 吸合 KM4吸合
KM2吸合→M2正转
KM4断电→M3停转
M2停止运转后,再夹紧摇臂。KT1的延时时间应视摇臂在M2断电至停转前的惯性大小调整,应保证摇臂上升(或下降)后才进行夹紧,一般调整在1~3秒。摇臂升降的限位保护,由组合开关ST1来实现。ST1有两对触点,ST1-1是摇臂上升时的极限位置保护,ST1-2(27-17)是摇臂下降时的极限位置保护。当摇臂上升到极限位置时,ST1-1(15-17)动作,将电路断开,则KM2断电释放,摇臂升降电动机M2停止旋转。但ST1的另一触点ST1-2(27-17)仍处于闭合状态,保证摇臂能够下降。同理,当摇臂下降到极限位置时,ST1-2(27-17)动作,电路断开,KM3释放,摇臂升降电动机M2停转。而ST1的另一动断触点ST1-1(15-17)仍闭合,以保证摇臂能够上升。
摇臂的自动夹紧是由行程ST3来控制的。如果液压夹紧系统出现故障而不能自动夹紧摇臂,或者由于ST3调整不当,在摇臂夹紧后不能使ST3(7-47)的动断触点断开,都会使液压泵电动机处于长期过载运行状态,这是不允许的。为了防止损坏液压泵电动机,电路中使用了热继电器FR2。摇臂夹紧动作过程如下: 摇臂升到预定位置,松开SB3→KT1(47-49)断电延时闭合→KM5吸合、M3反转→摇臂夹紧→ST3(7-47)受压断开→KM5、M3、均断电释放。
3.立柱和主轴箱松开、夹紧控制立柱和主轴箱的松开及夹紧控制可单独进行,也可同时进行,由转换开关SA2和复位按钮SB7(或SB8)进行控制。SA2有3个位置:中间位(零位)时,立柱和主轴箱的松开或夹紧同时进行左边位为立柱的夹紧或放松 右边位为主轴箱的夹紧或放松。复合按钮SB7、SB8分别为松开、夹紧控制按钮。以主轴箱的松开和夹紧为例:先将SA2扳到右侧,触点(57-59)接通,(57-63)断开。当要主轴箱松开时,按松开按钮SB7,时间继电器KT2、KT3的线圈同时得电,,KT2是断电延时型时间继电器,它的断电延时断开的常开触点 (7-57)在通电瞬间闭合,电磁铁YA1通电吸合。经1-3秒延时后,KT3的延时闭合常开触点(7-41)闭合,接触器KM4线圈经(1-3-5-7-41-43-37-39-6-2)线圈断电,液压泵电动机M3正转,压力油经分配阀进入主轴箱右缸,推动活塞使主轴箱放南通纺织职业技术学院毕业设计)论文( 14 松。活塞杆使行程开关 ST4复位)触点ST4常闭开关,ST4常开闭合。指示灯HL2亮)表示主轴箱已松开。主轴箱夹紧的控制线路及工作原理与松开时相似)只要按松开按钮SB7换成夹紧按钮SB8)接触器KM4换成KM5)M3由正向转动变成反向转动)指示灯HL2换成HL3即可。
当把转换开关SA3拌到左侧时)触点)57-63(接通))57-59(断开。按松开按钮SB7或夹紧按钮SB8时)电磁铁YA2通电)此时)立柱松开或夹紧.SA2在中间位时)触点)57-59(、)57-63(均接通。按SB7或SB8)电磁铁YA1、YA2均通电)主轴箱和立柱同时进行松开或夹紧。其他动作过程与主轴箱松开或夹紧时完全相同)不在论述。由于立柱和主轴箱的松开与夹紧是短时间的调整工作)故采用点动控制方式。
4,冷却泵控制
冷却泵电动机M4容量小)所以用组合开关QS直接控制其运行和停止。
5,照明、信号电路
(1)机床照明电路QF5机床工作照明电路开关,同时过载及短路保护作用,EL为工作照明灯。
(2)工作信号指示HL1电源指示灯,当和上QF2时HL1指示灯亮,HL2为立柱和主轴箱松开指示灯,HL3为立柱和主轴箱夹紧指示灯,分别由限位开关ST4长闭触头和ST4常开触头控制。HL4为主轴电动机旋转指示灯,由KM1常开触头控制。
3 基于PLC的Z3040控制系统设计
3.1 PLC的型号选择
3.1.1 PLC的型号选择
随着PLC技术的发展,PLC产品的种类也越来越多。不同型号的PLC,其结构形式、性能、容量、指令系统、编程方式、价格等也各有不同,适用的场合也各有侧重。因此,合理选用PLC,对于提高PLC控制系统的技术经济指标有着重要意义。PLC机型选择的基本原则是在满足功能要求及保证可靠、维护方便的前提下,力争最佳的性能价格比。
(1)确定I/O点数
在改造设计中尽可能利用原有电器)以利于节省投资。根据原控制电路来确定I/O端口点数,其中,按钮8个,行程开关5个,转换开关1个(触点位置3个),热继电器常闭2个,电压继电器触点1个,控制线路电源总开关1个,共20个输入端口点数.接触器7个,电压继电器一个,信号灯4个,共计12个输出端口点数。
(2)选配PLC的型号
在选用PLC上,考虑到只是对Z3040型钻床做电器部分的改造)输出端口需要12个,输入端口需要20个。而且并不通过网络或其他方式做远程控制。因此,考虑到经济,实用,稳定等方面因素。我决定选用因此在满足以上条件的情况下,我选择FX2N-48MR型 作为本次设计所用PLC。其I/O地址分配如下表所示: Z3040型摇臂钻床PLC控制I/O(输入、输出)
3.1.2 Z3040摇臂钻床PLC控制系统电路图设计
根据I/O地址分配表设计PLC控制系统电路图。
1.设计中的几个问题,
(1)控制电源
接触器、电磁铁及指示灯仍采用原来的110V、6.3V电压不变。
(2)Z3040型摇臂钻床照明灯、通电指示灯和信号控制电路的处理
手动控制Z3040型摇臂钻床照明灯的电路和电源指示灯电路可用原控制电路控制,也可以用PLC 控制,本设计照明灯的电路采用原控制电路控制,信号控制电路采用PLC 控制。
(3)在控制电路中(摇臂升降电动机和液压泵电动机都需要正反转控制,必须设置互锁环节。其方案有三
方案一是在梯形图中设置互锁;
方案二是利用正反转接触器常闭触点在输出电路中实现互锁;
方案三是在编制梯形图时对这两台电动机都设置互锁并结合正反转接触器常闭触点在输出电路中的互锁。
从这三个方案来看方案三实现了双重保护,可避免电源短路,有效保证安全。因此本设计采用第三个方案。
(4)主轴电动机和液压泵电动机过载保护元件热继电器常闭触点放置问题
热继电器常闭触点可直接接在输出端,本设计为控制方便将热继电器常闭触点接在PLC的输入端。2.Z3040摇臂钻床控制系统电路图根据上述设计理念设计出Z3040摇臂钻床控制系统电路图。如图所示:
Z3040摇臂钻床控制系统电路图
3.2 基于PLC的Z3040型摇臂钻床控制系统软件设计
3.2.1 PLC梯形图程序设计
1.系统预开程序
本段梯形图程序是为主电动机及其他电动机启动做准备。当合上FQ3(X0)按下SB1(X2)低电压继电器KV(Y0)得电并自锁,其常开触点KV(X3)闭合接通了控制电路电源为机床工作做准备。梯形图程序如图4-2所示。
图4-2 主电动机及其他电动机启动做准备
2.主轴电动机控制程序
主轴电动机只做单方向旋转.需要过载保护.过载保护由热继电器FR1(X4)完成。梯形图程序如图
4-3所示。
图4-3 过载保护
3.摇臂升降控制程序
摇臂的升(或降)严格按照摇臂松开—升(或降)—夹紧的顺序进行。为此,要求夹紧与放松作用的液压泵电动机与摇臂升降电动机按一定顺序启动工作.由摇臂松开行程开关与摇臂夹紧行程开关发出控制信号进行控制。当要求摇臂上升)或下降-时.按下SB3(或SB4)首先启动主轴箱、立柱、摇臂松开电路当松开到位时ST2(X13)常开触点闭合,使液压泵电动机旋转(正转或反转),摇臂上升(或下降)。液压泵电动机正、反转需必要的互锁。摇臂上升、下降流程图如图a、b所示 梯形图如图4—6所示。
4.主轴箱、立柱、摇臂松开、夹紧控制程序
Z3040摇臂钻床.摇臂的松开、夹紧与摇臂的升降要求能自动控制.本设计采用定时器与行程开关配合完成.有必要的联锁保护。梯形图程序如图4—7所示。
图4—4 a、摇臂上升流程图
图4—5 b.摇臂下降流程图
图4—6 摇臂上升梯形图
图4—7 摇臂下降梯形图
5.主轴箱、立柱松开、夹紧控制程序
主轴箱、立柱松开与夹紧控制要求可单独操作.也可以同时操作.由转换开关SA和SB5、SB6配合定时器进行控制。梯形图程序如图4—8所示。
图4—8 主轴箱、立柱松开与夹紧控制
6.冷却泵控制
冷却泵电动机采用组合开关QS直接控制其启停。
3.2.2 PLC梯形图系统调试
将各部分梯形图程序上机调试并合并成如下图所示的Z3040型摇臂钻床PLC控制系统梯形图.经过调试和模拟实验.所设计的梯形图程序完全满足Z3040型摇臂钻床对控制系统的要求。
图4—9 Z3040摇臂钻床PLC控制系统梯形图
2.2.2PLC控制指令表、
0 LD X0
1 AN Y0
2 LD X0
3 ANI X1
4 LD X2
5 OR Y0
6 ANB
7 OUT Y0
8 LD X3
9 MPS
10 LD X5
11 OR Y1
12 ANB
13 ANI X6
14 AND X4
15 OUT Y1
16 MRD X7
17 LD X7
18 ANI X11
19 LD X10
20 ANI X12
21 ORB
22 ANB
23 OUT M0
24 MRD
25 LD M0
26 ANI X13
27 ANI M1
28 LD M1
29 ANI X17
30 AND T3
31 ORD
32 ANB
33 AND X15
34 ANI Y5
35 OUT Y4
36 MRD
37 AND M0
38 AND X13
39 MPS
40 ANI X10
41 ANI Y3
42 OUT Y2
43 MPP
45 ANI X2
46 OUT Y3
47 MRD
48 LDI X16
49 AND M2
50 ORI X14
51 ANB
52 AND X15
53 ANI T1
54 ANI Y4
55 OUT Y5
56 MRD
57 AND M0
58 OUT T1
61 MRD
62 LD X16
63 OR X17
64 ANB
65 ANI M0
66 OUT M1
67 OUT T2
70 MRO
71 LD X21
72 OR X22
73 ANB
74 AND T2
75 OUT Y6
76 MRD
77 LD X23
78 OR X22
79 ANB
80 AND T2
81 OUT Y7
82 MPP
83 AND M1
84 OUT M2
85 OUT T3
88 LD X3
89 MPS
90 AND X20
91 OUT Y11
92 MRD
93 AND X20
94 OUT Y12
PLC改造Z3050摇臂钻床设计论文. docx
封面 PLC改造Z3050摇臂钻床 学校:荣昌世纪培训学校 姓名:邓祥富
内容提要 本论文是研究机械加工中常用的Z3040摇臂钻床传统电气控制系统的改造 问题,指在解决传统继电器—接触器电气控制系统存在的线路复杂、可靠性稳定 性差、故障诊断和排除困难等难题。由于PLC电气控制系统与继电器—接触器 电气控制系统相比,具有结构简单,编程方便,调试周期短,可靠性高,抗干 扰能力强,故障率低,对工作环境要求低等一系列优点。因此,本论文对Z3040摇臂钻床电气控制系统的改造,将把PLC控制技术应用到改造方案中去,从而 大大提高摇臂钻床的工作性能。论文分析了摇臂钻床的控制原理,制定了可编 程控制器改造Z3040摇臂钻床电气控制系统的设计方案,完成了电气控制系统 硬件和软件的设计,Z3050摇臂钻床的电气原理图绘制、I/O端口的分配、I/O 硬件接线图的绘制、PLC梯形图程序的设计。论述了采用PLC取代传统继电器—接触器电气控制系统从而提高机床工作性能的方法。 目录 1绪论............................................................ .3 1.1 PLC的介绍 (3) 1.2 PLC的基本组成及工作原理 (3) 2 Z3040摇臂钻床传统电气控制系统的原理 (4) 2.1主电路 (4) 2.2 控制电路、信号及照明电路 (5) 2.3 主电动机控制 (5) 2.4 摇臂的升降控制 (5) 2.5 立柱和主轴箱的夹紧和松开控制 (6) 3.1 PLC型号的选择 (7) 3.2 PLC的I/O分配表 (8) 3.3 PLC的硬件接线 (9) 4 PLC控制程序 (10) 5 结论 (11) 6 参考文献 (11)
推荐-Z3040摇臂钻床的PLC改造 精品
宜宾职业技术学院题目:Z3040摇臂钻床的PLC改造
()原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的(),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用()的规定,即:按照学校要求提交()的印刷本和电子版本;学校有权保存()的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存;在不以赢利为目的前提下,学校可以公布的部分或全部内容。 作者签名:日期:
学位原创性声明 本人郑重声明:所呈交的是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位版权使用授权书 本学位作者完全了解学校有关保留、使用学位的规定,同意学校保留并向国家有关部门或机构送交的复印件和电子版,允许被查阅和借阅。本人授权大学可以将本学位的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位。 涉密按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
Z3040摇臂钻床的PLC改造设计说明
职业技术学院 毕业设计 题目:Z3040摇臂钻床的PLC改造
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部容。 作者签名:日期:
学位论文原创性声明 本人重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
#Z3040摇臂钻床的PLC改造
摘要:钻床是一种常用的机床,在生产中应用很广泛,种类繁多。然而,在运作中,传统的钻床暴露了越来越多的问题,比如:触点过多、故障出现频繁、维修不方便,影响了钻床的正常工作,引起产品质量降低。 由于各种各样的问题,钻床的改造势在必行。在众多的改造方案中,PLC改造以其他同类产品所不具备的优点脱颖而出。 本文以PLC为控制核心进行的对Z3040摇臂钻床的自动化改造,在本文中阐述了传统钻床继电器控制电路以及行程开关的缺点,提出了详细的改进方案。绘制出了改造过后的电气原理图及PLC接线图等。并编写了PLC的控制程序,取得了良好的效果。 关键词:摇臂钻床PLC 传感器改造 目录 第一章摇臂钻床的介绍 一、Z3040摇臂钻床系统的机械系统 (3) 二、Z3040摇臂钻床系统的电气系统 (4) 三、Z3040摇臂钻床的润滑和冷却系统 (7) 第二章继电器控制的摇臂钻床的工作原理 一、控制电路电路原理图 (8) 二、钻床的操作步骤及工作原理 (9) 三、电气元件清单 (11) 第三章 Z3040摇臂钻床的电气控制的改造 一、Z3040摇臂钻床行程开关的改进 (14) 二、Z3040摇臂钻床继电器控制线路的改进 (18) 三、I/O分配表 (21) 四、Z3040摇臂钻床改造的接线图 (22) 五、程序 (23) 结束语 (26)
答谢辞 (27) 参考文献 (28) 第一章Z3040摇臂钻床介绍 钻床是一种常用的机床,分台式钻床、立式钻床和摇臂钻床。种类繁多,在工业生产中应用得非常广泛,本文以Z3040摇臂钻床为对象进行PLC改造。 图1-1 XXXXXX 一 Z3040摇臂钻床系统的机械系统 Z3040摇臂钻床整个系统可实现主轴旋转、主轴进给摇臂升降及主轴箱在摇臂上移动等功能(参看表1-3)(1)主轴旋转 主轴的旋转有正、反转及停止由手柄16(主轴正反转及停止手柄)操纵。当手柄向左扳动,主轴正转,并在面板 上指示灯显示旋向;当手柄在中间位置时主轴停止,指示灯熄灭;当手柄向右扳动,主轴反转,另一指示灯显示旋向。 选用不同的转速时,可转动手轮11(主轴旋转变换手轮)即可得到主轴的12种转速,手轮上设有“0”位,用以校调和对刀。变速时必须使用手柄16(主轴正反转及停止手柄)处于中间位置以停止电机旋转,否则会造成有关齿轮在旋转状态下进行切换,而发生意外。 主轴电机主要带动刀具做旋转运动为零件进行钻孔、扩孔、铰孔、镗孔、平面和攻螺纹的动力电机。
基于PLC系统的摇臂钻床控制系统改造毕业设计论文
理工类大学本科毕业设计论文 畢業設計設計題目:基於PLC的搖臂鑽床控制系統改造 系別:機電工程 班級:自動化技術 姓名: 指導教師: 2011年6月7日
基於PLC的搖臂鑽床控制系統改造 摘要 本設計是研究機械加工中常用的Z3050搖臂鑽床傳統電氣控制系統的改造問題,旨在解決傳統繼電器—接觸器電氣控制系統存在的線路複雜、可靠性穩定性差、故障診斷和排除費時費力等難題。由於PLC電氣控制系統與繼電器—接觸器電氣控制系統相比,具有結構簡單,編程方便,調試週期短,可靠性高,抗干擾能力強,故障率低,對工作環境要求低等一系列優點,因此,本設計對Z3050搖臂鑽床電氣控制系統的改造,將把PLC控制技術應用到改造方案中去,以提高搖臂鑽床的工作性能。設計中分析了搖臂鑽床的控制原理,制定了可編程控制器改造Z3050搖臂鑽床電氣控制系統的控制方案,完成了電氣控制系統硬體和軟體的設計,其中包括PLC 機型的選擇、I/O端口的分配、I/O硬體接線圖的繪製、PLC梯形圖程式的設計。對PLC控制搖臂鑽床的工作過程作了詳細闡述,論述了採用PLC取代傳統繼電器—接觸器電氣控制系統從而提高機床工作性能的方法,給出了相應的控制原理及接線圖。 關鍵字:可編程控制器,搖臂鑽床,梯形圖,電氣控制系統
Reformation of Radial Drilling Machine Z3050 by PLC Abstract This paper is to studies the machine process in common use Z3050 in inside radial drilling machine electric control system improves problem. The aim is solving device complexity, inferior reliability and stability, malfunction analysis and trouble obviation of the traditional relay electric control system. Because of electric control system PLC there are lots of advantages which include design, install, connect the line and adjust to try workload small, the period of research and manufacture is short, reliability is high, the ability of Anti- interference is very strong, the rate of break down is low, the demand of work environment is low, maintenance convenience a series of advantage etc. Therefore, a work for to the Z3050 radial drilling machine electric control system reforming, will reforming PLC control technique application in the project, then increasing radial drilling machine’s work function. The paper introduces to the control principle of the radial drilling machine. Established the programmable controller improve the design project of electric control system of Z3050 radial drilling machine. Completed the design of the software and hardware of the electric control system, Among them include the model of PLC choice、the I/O allotment of the address、the I/O hardware connects the line diagram、PLC trapezium diagram’s design. It explains that PLC control the work process of radial drilling machine. Discussing the adoption PLC replaces the traditional electric control system’s method and increases the work func tion of radial drilling machine, give a homologous control principle diagram. Key words: PLC,Radial drilling machine,Trapezium diagram,Electric Control System
基于PLC的摇臂钻床电气控制系统
摘要 本论文是研究机械加工中常用的Z3040摇臂钻床传统电气控制系统的改造问题,旨在解决传统继电器—接触器电气控制系统存在的线路复杂、可靠性稳定性差、故障诊断和排除困难等难题。由于PLC电气控制系统与继电器—接触器电气控制系统相比,具有结构简单,编程方便,调试周期短,可靠性高,抗干扰能力强,故障率低,对工作环境要求低等一系列优点。因此,本论文对Z3040摇臂钻床电气控制系统的改造,将把PLC控制技术应用到改造方案中去,从而大大提高摇臂钻床的工作性能。论文分析了摇臂钻床的控制原理,制定了可编程控制器改造Z3040摇臂钻床电气控制系统的设计方案,完成了电气控制系统硬件和软件的设计,其中包括PLC机型的选择、I/O端口的分配、I/O硬件接线图的绘制、PLC梯形图程序的设计。对PLC控制摇臂钻床的工作过程作了详细阐述,论述了采用PLC取代传统继电器—接触器电气控制系统从而提高机床工作性能的方法,给出了相应的控制原理图。 关键词:可编程控制器,摇臂钻床,梯形图,电气控制系统
目录 No table of contents entries found.附录A (15) 附录B (16)
1 绪论 本课题的选题背景和意义 Z3040摇臂钻床是工厂中常用的金属切削机床,它可以进行多种形式的加工,如:钻孔、镗孔、铰孔及螺纹等。从控制上讲,它需要机、电、液压等系统相互配合使用,而且,要进行时间控制。它的调速是通过三相交流异步电动机和变速箱来实现的。也有的是采用多速异步电动机拖动,这样可以简化变速机构。摇臂钻床的主轴旋转运动和进给运动由一台交流异步电动机拖动,主轴的正反向旋转运动是通过机械转换实现的。故主电动机只有一个旋转方向。此外,摇臂的上升、下降和立柱的夹紧、放松各由一台交流异步电动机拖动[1]。 目前,我国的Z3040摇臂钻床的电气控制系统普遍采用的是传统的继电器—接触器控制方式。因其所要控制的电机较多所以电路较复杂,在日常的生产作业当中,经常发生电气故障,从而影响生产。另外,一些复杂的控制如:时间、计数控制用继电器—接触器控制方式较难实现,所以,有必要对传统电气控制系统进行改进设计。PLC电气控制系统可以有效的弥补上述系统的这一缺陷。 可编程逻辑控制器(Programmable Logic Controller)简称PLC,是从早期的继电器逻辑电气控制系统发展而来,它不断吸收微型计算机控制技术,使之功能不断增强,逐渐适合复杂的电气控制系统。PLC之所以有较强的生命力,在于它更加适应工业现场和市场要求。可靠性高,抗干扰能力强、编程方便、价格低、寿命长。与单片机相比,它的输入/输出端更接近现场设备,不需添加太多的中间部件,这样可以大大节省用户的开发时间与生产成本。 现在应用于各种工业控制领域的PLC种类繁多,规模大小和功能强弱千差万别,但他们具有以下一些共同的特点。 可靠性高。可靠性是用户的首选要求,目前各厂家生产的PLC,平均无故障时间都大大超过IEC规定的10万小时,例如:西门子、ABB、松下、三菱等微小型PLC,而且都有完善的自诊断功能,判断故障迅速。 灵活组态。可编程控制器是系列化产品,通常采用模块化结构来完成不同的任务组合。输入输出端口选择灵活,有多种机型,组合方便。 功能强大,除基本的逻辑控制、定时、计数、算术运算功能外,配合特殊功能模块还可实现点位控制、PTO运算、过程运算、数字控制等功能,为方便工厂管理又可以与上位机通信,通过远程模块可以控制远程设备。因此,PLC几乎是全能的工业控制计算机。 编程方便,易于使用。PLC的编程可采用与继电器极为相似的梯形图语言,直观易懂,深受现场电气人员的欢迎。近年来又发展了面向对象的顺控流程图语言(Sequential Function Chart),使编程更加简单方便。
Z3050型摇臂钻床的PLC改造设计
专业综合设计与实践任务书学院:专业:电气工程及其自动化班级:
目录 1.改造的目及原因 (3) 2.摇臂钻床工作原理 (3) 3.电气控制线路分析 (4) 3.1主电路分析 (4) 3.2控制电路分析 (5) 3.2.1主轴电机M1的控制 (6) 3.2.3摇臂升降控制 (6) 3.2.3立柱和主轴箱的夹紧与放松控制 (7) 3.2.4冷却泵电机M4的控制 (7) 3.2.5照明、指示电路分析 (7) 4.Z3050控制系统PLC改造设计 (8) 4.1系统主要组成部分 (8) 4.2PLC的选型 (9) 5.输入输出设计 (10) 6.梯形图设计 (11) 7.调试 (12) 8.总结 (12) [参考文献] (13) 附录 (14) 主电路 (14) PLC外部接线图 (15) 原理图 (16) 梯形图 (17)
1.改造的目及原因 传统机床控制系统基本上采用交流继电器接触器控制方式,可靠性较差。存在触点寿命低、故障率高、线路维护困难等缺点。可编程控制器(PLC)是以微处理器为基础,综合计算机技术、自动控制技术和通信技术发展起来的一种工业自动控制装置,应用灵活、可靠性高、维护方便。应用PLC对传统机床控制系统进行改造可取得良好效果将把 PLC 控制技术应用到改造 Z3050 摇臂钻床电气控制系统中去,从而大大提高摇臂钻床的工作性能。论文对摇臂钻床主电路进行了分析,对控制线路进行了详细的阐述,完成了电气制系统硬件和软件的设计,其中包括 PLC机型的选择、输入输出信号及地址的分配、I/O 端口的分配、PLC 梯形图程序的设计。 2.摇臂钻床工作原理 (1)Z3050型摇臂钻床采用4台电动机拖动,他们分别是主轴电动机(M1),摇臂升降电动(M2),液压泵电动机(M3)和冷却泵电动机(M4),这些电动机都采用直接启动方式。 (2)为了适应多种形式的加工要求,摇臂钻床主轴的旋转及进给运动有较大的调速范围,一般情况下多由机械变速机构实现。 (3)摇臂钻床的主运动和进给运动均为主轴的运动,为此这两项运动有一台主轴电动机拖动,分别经主轴传动机构,进给传动机构实现主轴的旋转和进给。
用S7-200编写摇臂钻床PLC程序梯形图
可编程序控制器 课程设计报告 学校:哈尔滨理工大学荣成学院院系:电气信息系 专业班级:电机10-XX 学号: 姓名:
一.题目名称 用PLC改造Z3040X16型摇臂钻床的控制电路图。具体的接触器-继电器控制系统详见《工厂电气控制设备》129页电路,试将其进行PLC改造。二.任务要求 1.列出输入输出I/O分配表,画出PLC硬件接线图,列出PLC程序清单及注释。 2.用S7-200编写摇臂钻床PLC程序梯形图。 三.确定总体方案 1.分析控制对象 (1)Z3040X16型摇臂钻床的动作是通过机、电、液进行联合控制来实现的。 (2)控制电路设有总起动按钮和总停止按钮 (3)采用4台电动机拖动。分别是主电动机、摇臂升降电动机、液压泵电动机及冷却泵电动机。 (4)摇臂的移动严格按照摇臂松开→移动→摇臂夹紧的程序进行,要求夹紧放松作用的液压泵电动机与摇臂升降电动机按一定顺序起动工作,由摇臂松开行程开关与夹紧行程开关发出控制信号进行控制。 (5)机床具有信号指示装置,对机床的每一主要动作作出显示,这样便于操作和维修。 (6)摇臂的夹紧放松与摇臂升降按自动控制进行,而立柱和主轴箱的夹紧放松可以单独操作,也可以同时进行。
2.Z3040×16型摇臂钻床的电气控制线路图如下图所示 (1)主轴电动机M1的要求:单方向旋转,过载保护。 (2)摇臂升降电动机M2的要求:摇臂移动的过程必须是先松开摇臂,在移动,到位后摇臂自动夹紧。电动机能正反转。 (3)液压泵电动机M3的要求:电动机能正反转,有过载保护。四.PLC元器件分配及I/O口分配表 分析Z3040X16型摇臂钻床,找出改用的PLC控制的输入、输出信号,共有14个输入信号,8个输出信号。 I/O分配表
Z3040摇臂钻床电气控制系统PLC改造毕业设计
Z3040摇臂钻床电气控制系统PLC改造 毕业设计
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
Z3050型摇臂钻床PLC改造
目录 第1章绪论 (1) 第2章 Z3050型摇臂钻床简介 2.1摇臂钻床的外观 (2) 2.2摇臂钻床的性能及用途 (2) 2.3摇臂钻床的运动形式 (4) 2.4摇臂钻床的原理分析 (4) 2.5摇臂钻床的主要结构 (4) 2.6Z3050型摇臂钻床电气控制线路原理分析 (4) 2.7摇臂钻床的电气控制要求 (6) 2.8摇臂钻床的使用 (6) 第3章控制系统设计 3.1改造思想 (7) 3.2改造方案 (7) 3.3P L C的介简 (7) 3.4P L C的选择 (8) 第4章三菱PLC的系统构成与工作原理 4.1三菱可编程控制器的基本组成 (9) 4.2三菱可编程控制器的功能特点 (9) 4.3三菱可编程控制器的基本工作原理 (10) 第5章Z3050型摇臂钻床的PLC改造过程 5. 1 任务提出简述 (11) 5. 2工作台控制系统I/O地址分配表 (12)
5.3控制功能接线图 (13) 5.4梯形图 (14) 总结 (15) 致谢 (16) 参考文献 (17) 摘要 摇臂钻床是用于一些大中型企业对工件的加工,老式的摇臂钻床电气控制线路是以各种不同的继电器为主要元件,所以负担比较沉重,大量的接触器需要大量的资金,在生产加工工件时接触器触头不断的关断会造成触头的发黑。 在安装这些继电器时需要大量的空间。维修依靠经验,继电器的位置发生变化或者是线路发生改变维修更是困难。 随着现代社会生产的发展和技术的进步,现代化工业生产自动化水平的日益提高及微电子技术的飞速发展,出现了一种可编程控制器(PLC)。所以我想能不能用可编程控制器(PLC)结合一些外部设备代替摇臂钻床电气设备的控制,以降低床子的造价费用,并且还提高床子的加工精度、延长使用寿命。 关键词:Z3050型摇臂钻床、PLC、自动控制。
PLC控制的Z3050型摇臂钻床电气控制
皖西学院 课程设计报告书 系别:机电学院 专业:13电气 学生姓名:学号: 课程设计题目:PLC控制的Z3050型摇臂钻床电气控制起迄日期:- 课程设计地点:PLC电气控制实验室 指导教师:翁志刚 下达任务书日期: 2016年5月15日
目录 前言 (1) 1 Z3050摇臂钻床的简介 (2) 摇臂钻床的主要结构 (2) 摇臂钻床的运动形式 (2) 摇臂钻床电气拖动特点 (3) 摇臂钻床及原理图说明 (4) 2 系统元器件选型 (5) Z3050摇臂钻床主回路元件表 (5) PLC的选型 (6) 硬件的设计 (6) PLC的I/O分配 (6) PLC的外部接线图 (8) 3 程序的设计与仿真 (9) 梯形图程序设计 (9) 仿真调试与结果 (11) 参考文献 (15) 致谢 (14)
前言 摇臂钻床使用于单件或批量生产有多孔的大型零件的孔加工,是一般机械加工车间常用的机械,由于其控制系统是采用继电器控制系统,电路接线复杂,出点多,长期使用后,故障多,故障排除困难。常常影响企业生产。 PLC具有可靠性强,使用方便,维护简单的优点。因此,利用PLC对摇臂钻床继电器控制线路进行改造,有利于提高设备的可靠性,使用率。正是由于PLC 控制系统的种种优点,因此本次对Z3050摇臂钻床的电气控制系统,可以提高Z3050摇臂钻床工作性能和系统的工作稳定性,为工业生产的现代化带来生机。同时,提高了PLC编程水平和实践能力,为今后在实际工作中熟练使用PLC进行工业系统的设计打好基础。
1 Z3050摇臂钻床的简介 摇臂钻床的主要结构 摇臂钻床主要由底座、内立柱、外立柱、摇臂、主轴箱及工作台等部分组成。内立柱固定在底座的一端,在他的外面套有外立柱,外立柱可绕内立柱回转360度。摇臂的一端为套筒,它套装在外立柱做上下移动。由于丝杆与外立柱练成一体,而升降螺母固定在摇臂上,因此摇臂不能绕外立柱转动,只能与外立柱一起绕内立柱回转。主轴箱是一个复合部件,由主传动电动机、主轴和主轴传动机构、进给和变速机构、机床的操作机构等部分组成。主轴箱安装在摇臂的水平导轨上,可以通过手轮操作,使其在水平导轨上沿摇臂移动。 摇臂钻床的运动形式 当摇臂钻床进行加工时,由特殊的加紧装置将主轴箱紧固在摇臂导轨上,而外立柱紧固在内立柱上,摇臂紧固在外立柱上,然后进行钻削加工。钻削加工时,钻头一边进行旋转切削,一边进行纵向进摇臂钻床给,其运动形式为:(1)摇臂钻床的主运动为主轴的旋转运动; (2)进给运动为主轴的纵向进给; (3)辅助运动有:摇臂沿外立柱垂直移动,主轴箱沿摇臂长度方向的移动,摇臂与外立柱一起内立柱的回转运动。
PLC在改造Z37摇臂钻床中应用(2)
PLC 在改造Z37摇臂钻床中的应用 1. Z37型钻床 主电路: Z37摇臂钻床共有四台三相异步电动机,其中主轴电动机 M2由接触器KMI 控制,热继电器 KH 作过载保护,主轴的 正、 反向控制是由双向片式摩擦离合器来实现的。摇臂升 降电动机 M3由接触器KM2 KM3控制,FU2作短路保护。 立柱松紧电动机 M4由接触器KM4和 KM5控制,FU3作短路 保护。冷却泵电动机 M1是由组合开关 QS2控制的,FUI 作 短路 保护。摇臂上的电气设备电源,是通过转换开关 QSI 及汇流环 YG 引入。 2. 控制、照明电路分析 合上电源开关QSl ,控制电路的电源由控制变压器 TC 提供110v 电压。Z37摇臂钻床控制电路采用十字 电痺 主输 摇评升降电劲机 立柱松常电功机 低压阻叩 控制 翻升降控制 开关 电动机 上升 下礴 尿护 上升 下醉 T.2H 立柱耕第控制 KH -一SA KM5 KM4 lx 3|x|x \ |X|U Hlb X6 137 X7 7 []Q[] U12 VliWIJ KA KMI KV2 KM3 KM4 KM5 (JS2 FIJI I 朴忡 1 2 3 4 5 6 7 & 9 10 11 13 5 台
3.基于PLC的Z37摇臂钻床电气控制系统硬件部分的设计 3.1PLC的选择 Z3 7摇臂钻床电气控制系统的设计方案由两部分组成,一部分为电气控制系统的硬件设计,也就是PLC的 机型的确定;另一部分是电气控制系统的软件设计,就是PLC控制程序的编写。为了使改造后的摇臂钻床 仍能够保持原有功能不变,此次改造的一个重要原则之一就是,不对原有机床的控制结构做过大的调整,只是将原继电器控制中的硬件接线改为用软件编程来替代。 根据物理结构的不同,PLC分为整体式、模块式和叠装式。整体式的每一I/O点的平均价格比模块式 便宜,小型电气控制系统一般使用整体式可编程控制器。此次所设计的电气控制系统属于小型开关量电气控制系统没有特殊的控制任务,整体式PLC完全可以满足控制要求,且在性能相同的情况下,整体式PLC 较模块式和叠装式PLC价格便宜,因此,Z37摇臂钻床电气控制系统的PLC选用整体式结构的PLC 考虑到任何一种PLC都可以满足开关量电气控制系统的要求,据此本课题将尽量采用价格便宜的PLC 摇臂钻床的电气控制系统需要17个输入口11个输岀口,PLC的实际输入点数应等于或大于所需输入 点数17,PLC的实际输出点数应等于或大于所需输出点数11,在条件许可的情况下尽可能留有10%-20%勺 裕量。 PLC存储器容量的估算方法:对于仅有开关量输入/输岀信号的电气控制系统,将所需的输入/输岀点 数乘以8,就是所需PLC存储器的存储容量(单位为bit )即(17+11 )X 8=224bit 本基于PLC的摇臂钻床电气控制系统的PLC输入模块应选直流输入模块,输入电压应DC24V电压。 为了使Z37摇臂钻床在改造后能够良好工作,确认日本松下公司生产的FP0-C14RS型和扩展单元 FP0-E16RS型和FP0-E8RS型PLC能够满足上述要求,该类型号PLC体积小,功能强,增加了一些大型机的 功能和指令,如PID和PWM Pulse Width Modulation ,脉宽调制)指令,对于控制器体积要求较高的应用系统是一种很好的选择。该型PLC具有Z37摇臂钻床电气控制系统所需的所有指令功能,其总输入点数 为20点,总输出点数为18点,用户存储器容量5K,输入模块电压为DC,输出模块为继电器型。由此可知,FP0-C32和FP0-SL1型PLC的技术性能指标完全能满足要求。 3.2PLC的I/O端口分配表
基于PLC的摇臂钻床自动控制系统的改造
目录 1 绪论.......................................................................................... 错误!未定义书签。 1.1本课题的选题背景和意义 ............................................... 错误!未定义书签。 1.2国内外关于本课题的技术研究现状和发展动态 ........... 错误!未定义书签。 2 Z3040摇臂钻床电气控制系统和原理分析 (3) 2.1主电路 ............................................................................... 错误!未定义书签。 2.2控制电路、信号及照明电路 (5) 2.2.1 主电动机的旋转控制 (5) 2.2.2 摇臂的升降控制 (5) 2.2.3 立柱和主轴箱的松开及夹紧控制 (7) 3 Z3040摇臂钻床PLC电气控制系统硬件部分的改造设计 (9) 3.1PLC型号的选择 (9) 3.1.1 PLC的物理结构 (9) 3.1.2 PLC的指令功能 (9) 3.1.3 PLC的输入输出点数 (9) 3.1.4 PLC的存储容量 (9) 3.1.5 输入模块的类型 (10) 3.1.6 输出模块的类型 (10) 3.2PLC的I/O端口分配表 (10) 3.3PLC的I/O电气接线图的设计 (12) 4 Z3040摇臂钻床电气控制系统软件部分的设计 (14) 4.1PLC梯形图程序的优化设计及程序调试: (14) 4.1.1 系统预开程序 (14) 4.1.2 主电动机的起动控制程序 (14) 4.1.3 摇臂升降控制程序 (15) 4.1.4 主轴箱和立柱分别单独夹紧或放松程序 (15) 4.1.5 主轴箱和立柱同时放松或夹紧控制程序 (16) 5 组态王简介 (16) 5.1组态王画面开发系统 (17) 5.2组态王画面运行系统 (18) 5.3组态王工程管理系统 (18) 5.4组态王新建工程 (18) 5.5创建组态画面 (18) 6 结论 (20) 致谢 (21) 参考文献 (21) 附录梯形图转换成指令表 (22)
Z30050摇臂钻床PLC改造设计与排故毕业设计
目录 第一部分设计任务与调研 (2) 第二部分设计说明 (3) 第三部分设计成果 (9) 第四部分结束语 (12) 第五部分致谢 (13) 第六部分参考文献 (14)
第一部分设计任务与调研 1、设计主要任务 实现Z3050摇臂钻床PLC改造设计与故障排除,程序模拟调试、故障排除获得成功。 1.1 设计的思路 依托电工实训中心和自动化设备维修实训中心的Z3050型摇臂钻床、PLC等实训设备,充分运用所学专业知识和实践技能,详细制定设计方案和阶段进度计划,通过程序设计、模拟调试、常见故障及检修与排除、修订完善,实现Z3050摇臂钻床PLC改造设计与故障排除,故障的分析及检修获取成功。 1.2 设计方法 利用图书馆借阅、文献检索、手册查询、设备选型、PLC编程、PLC实训室程序调试、排故实训室常见故障及检修与排除。 2、调研的目的和总结 本次设计的内容主要是利用PLC(Programmable Logic Controller)对z3050摇臂床的控制部分进行改造。我先对本次的设计进行了总体的思考和分析,使自己对z3050摇臂钻床的基本结构、运动情况、加工工艺要求等有一定的了解。Z305摇臂钻床主要有底座、内立柱、外立柱、摇臂、主轴箱、工作台等组成。对z3050摇臂钻床电气控制部分进行分析得出它需要完成开门断电功能、主轴电动机的正反转控制功能、刀架的快速移动功能、冷却泵电动机的控制。然后根据电气控制电路的线路图,编译PLC的梯形图,编译通过后,利实验台进行实验仿真。由于PLC极高的可靠性,极丰富的指令集,易于掌握,便捷的操作,丰富的内置集成功能,实时特性。因此使Z3050摇臂钻床在完成原有的功能特点外,还具有安装简便、稳定性好、易于维修、扩展能力强等特点。
运用PLC技术改造Z3040型摇臂钻床设计任务书
目录 摘要 (1) 1 绪论...... .................. .................. . (1) 1.1 本课题的选题背景和意义........................... . (1) 1.2 国外关于本课题的技术研究现状和发展动态 (3) 2 Z3040摇臂钻床传统电气控制系统的原理 (3) 2.1 主电路................................................. . 4 2.2 控制电路、信号及照明电路 (5) 2.2.1 主电动机的旋转控制 (5) 2.2.2 摇臂的升降控制 (5) 2.2.3 立柱和主轴箱的松开及夹紧控制....... (6) 3 基于PLC的Z3040摇臂钻床电气控制系统硬件部分的设计 (6) 3.1 PLC型号的选择 (7) 3.1.1 根据PLC的物理结构 (7) 3.1.2 根据PLC的指令功能 (7) 3.1.3 根据PLC的输入输出点数 (7) 3.1.4 根据PLC的存储容量 (7) 3.1.5 根据PLC的输入模块的类型 (7) 3.1.6 根据PLC的输出模块的类型 (8) 3. 2 PLC工作原理 (8) 3.3 PLC 的I/O 端口分配表 (9) 3.4 PLC的I/O电气接线图的设计 (10)
4 摇臂钻床电气控制系统软件部分的设计.................... . 11 4.1 PLC 梯形图程序的优化设计及程序调试.. (11) 4.1.1 系统预开程序 (11) 4.1.2 主电动机的起动控制程序.................... ... . (12) 4.1.3 摇臂升降控制程序 (12) 4.1.4 主轴箱和立柱同时放松或夹紧控制程序...................... .13 4.1.5 主轴箱和立柱分别单独夹紧或放松程序.................... ..14 4.1.6 信号显示程序........................................... .14 4.1.7 电源工作状态指示信号程序 (15) 5 结论.................. .......... ........ ........... . (15) 5.1 研究成果.................. .................. (15) 5.2 不足之处.................. .................. ........ (15) 参考文献.................. ............ ...... ........ (16) 致.................. .................. . (16)
毕业设计 z3050摇臂钻床的PLC改造 PLC
目录 目录 (1) 前言 (4) 第一章Z3050摇臂钻床简介 (7) 1.1Z3050摇臂钻床的控制原理图 (2) 1.2Z3050摇臂钻床的结构及运动形式 (3) 1.3Z3050摇臂钻床的电气控制系统分析....................... 错误!未定义书签。 1.4Z3050摇臂钻床电气控制特点与故障分析................... 错误!未定义书签。第二章 PLC介绍. (9) 2.1PLC定义................................................................. 2.2PLC的特点........................................................ 2.3PLC的分类及工作原理 2.4PLC的发展 (9) 第三章硬件设计 (10) 3.1PLC的物理结构 (10) 3.2PLC型号的选择 (10) 3.4PLC的外部接线图 (12) 第四章软件设计 (13) 4.1功能介绍............................................... 错误!未定义书签。 4.2功能表图 (14) 4.3程序梯形图 (15) 总结 (39) 参考文献...................................... 错误!未定义书签。
前言 本次设计的内容主要是利用PLC(Programmable Logic Controller)对z3050摇臂钻床的控制部分进行改造。我先对本次的设计进行了总体的思考和分析,使自己对z3050摇臂钻床的基本结构、运动情况、加工工艺要求等有一定的了解。Z3050摇臂钻床主要有底座、内立柱、外立柱、摇臂、主轴箱、工作台等组成。对z3050摇臂钻床电气控制部分进行分析得出它需要完成开门断电功能、主轴电动机的正反转控制功能、刀架的快速移动功能、冷却泵电动机的控制。然后根据电气控制电路的线路图,编译PLC的梯形图,编译通过后,利用PLC实验台进行实验仿真。由于PLC极高的可靠性,极丰富的指令集,易于掌握,便捷的操作,丰富的内置集成功能,实时特性。因此使Z3050摇臂钻床在完成原有的功能特点外,还具有安装简便、稳定性好、易于维修、扩展能力强等特点。 引言: 钻床是一种专门进行孔加工的机床,主要用于钻孔,扩孔,铰孔和攻丝等。钻床得主要类型有台式钻床,立式钻床,卧式钻床,深孔钻床和多轴钻床等。摇臂钻床是立式钻床中的一种,具有操作方便灵活,应用范围广的特点,特别适用于单件或批量生产中带有多孔大型零件的孔加工,是一般机械加工车间常见的机
相关文档
- 摇臂钻床控制器PLC梯形图
- 用S7-200编写摇臂钻床PLC程序梯形图
- PLC在改造Z37摇臂钻床中应用(2)
- 基于PLC系统的摇臂钻床控制系统改造毕业设计论文
- Z3040摇臂钻床电气控制系统PLC改造毕业设计
- 基于PLC的摇臂钻床电气控制系统的设计说明书
- 推荐-Z3040摇臂钻床的PLC改造 精品
- z3040摇臂钻床的plc改造毕业设计
- PLC控制的Z3050型摇臂钻床电气控制
- #Z3040摇臂钻床的PLC改造
- Z3040摇臂钻床电气控制系统PLC改造.doc
- Z30050摇臂钻床PLC改造设计与排故毕业设计
- PLC改造Z3050摇臂钻床设计论文. docx
- Z3050型摇臂钻床的PLC改造设计
- Z3050型摇臂钻床PLC改造
- 毕业设计 z3050摇臂钻床的PLC改造 PLC
- Z3040摇臂钻床的PLC改造设计说明
- PLC在改造Z37摇臂钻床中的应用毕业设计开题报告
- 基于PLC的摇臂钻床自动控制系统的改造
- Z3040摇臂钻床电气控制系统PLC改造