abaqus——MPC问题多点约束解析

6.MPC—多点约束
1.1 MPC定义
MPC(Multi-point constraints)即多点约束,在有限元计算中应用很广泛,它允许在计算模型不同的自由度之间强加约束。简单来说,MPC定义的是一种节点自由度的耦合关系,即以一个节点的某几个自由度为标准值,然后令其它指定的节点的某几个自由度与这个标准值建立某种关系。多点约束常用于表征一些特定的物理现象,比如刚性连接、铰接、滑动等,多点约束也可用于不相容单元间的载荷传递,是一项重要的有限元建模技术。
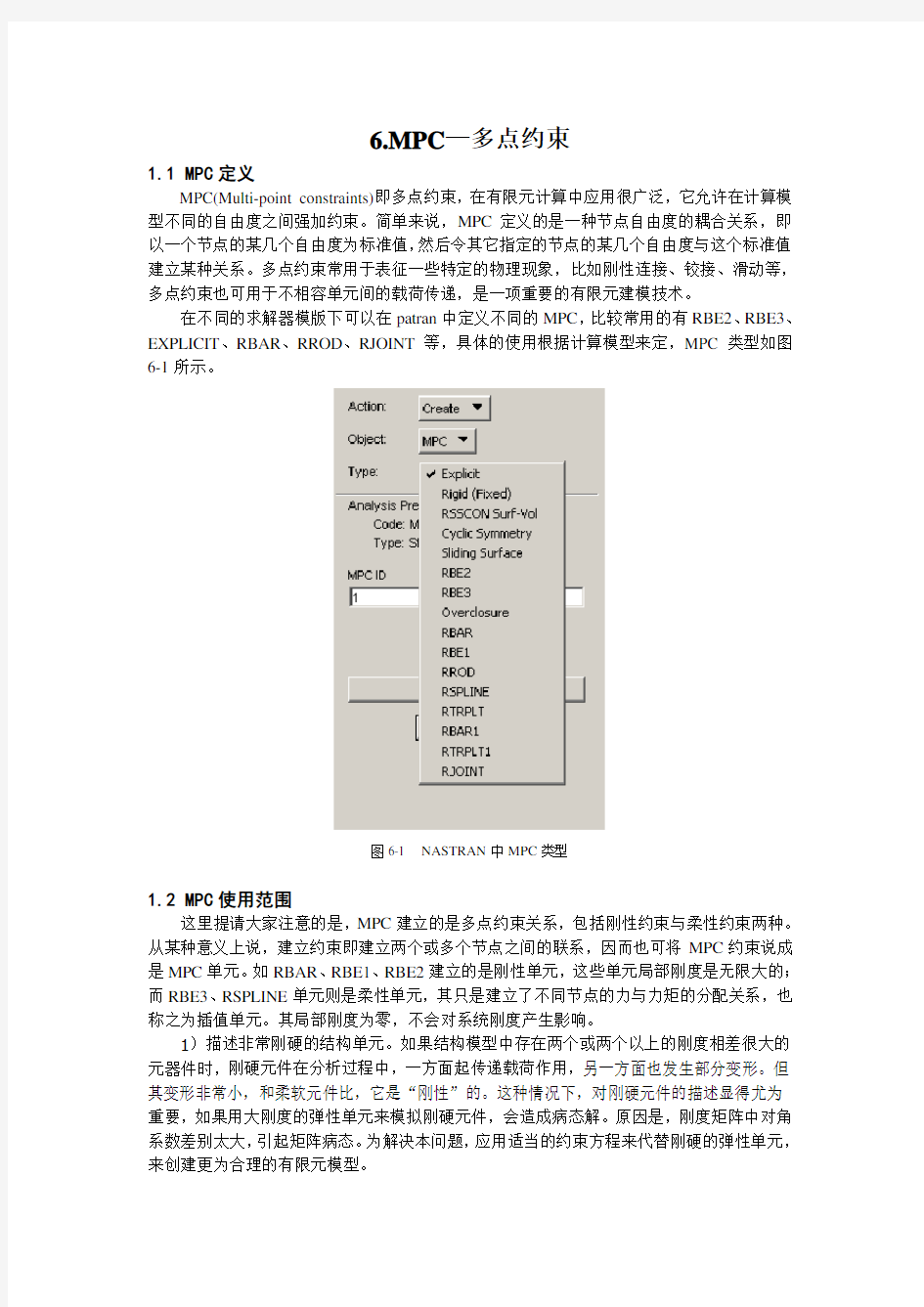
在不同的求解器模版下可以在patran中定义不同的MPC,比较常用的有RBE2、RBE3、EXPLICIT、RBAR、RROD、RJOINT等,具体的使用根据计算模型来定,MPC类型如图6-1所示。
图6-1 NASTRAN中MPC类型
1.2 MPC使用范围
这里提请大家注意的是,MPC建立的是多点约束关系,包括刚性约束与柔性约束两种。从某种意义上说,建立约束即建立两个或多个节点之间的联系,因而也可将MPC约束说成是MPC单元。如RBAR、RBE1、RBE2建立的是刚性单元,这些单元局部刚度是无限大的;而RBE3、RSPLINE单元则是柔性单元,其只是建立了不同节点的力与力矩的分配关系,也称之为插值单元。其局部刚度为零,不会对系统刚度产生影响。
1)描述非常刚硬的结构单元。如果结构模型中存在两个或两个以上的刚度相差很大的元器件时,刚硬元件在分析过程中,一方面起传递载荷作用,另一方面也发生部分变形。但其变形非常小,和柔软元件比,它是“刚性”的。这种情况下,对刚硬元件的描述显得尤为重要,如果用大刚度的弹性单元来模拟刚硬元件,会造成病态解。原因是,刚度矩阵中对角系数差别太大,引起矩阵病态。为解决本问题,应用适当的约束方程来代替刚硬的弹性单元,来创建更为合理的有限元模型。
2)在不同类型的单元间传递载荷。如在有限元模型中,包含三维实体单元和壳体单元。模型看来成功,没什么问题。但是求解是,会出现“刚度矩阵奇异”的错误。原因是,实体单元和壳体单元是不相容单元,实体单元节点有三个自由度(移动),而壳体单元节点却有五个自由度(三个移动,两个转动)。若不采取特殊处理,则无法将壳体单元上的力偶传递到实体单元上。为了消除这种奇异性,必须建立一种连接,作用是在实体中建立一个耦合,以承受壳体力偶。
3)任意方向的约束。当某节点可以沿着不平行于坐标轴的某个边界运动时,就需要定义一个约束方程,这个方程反映垂直于此边界的运动的约束。
4)刚性连杆。
1.3 MPC定义的数学基础
(1)小位移理论
(2)MPC对系统刚度、质量、载荷等的影响
1.4 MPC分类
MSC.Nastran中常用的MPC类型有如下几种。
◆Explicit 用于定义某节点的位移与其他若干节点的位移的函数关系,该函数是一个
一次多项式,具体方程如下所示:
U0 = C1U1 + C2U2 + C3U3 + ... + CnUn + C0
式中,U0为从自由度,Ui为主自由度,Ci是权系数,C0为常数项。
◆Rigid(fixed)固定的多点约束。其将若干个依赖节点与某个独立节点相互固定,从
而使依赖节点的所有自由度与独立节点保持一致,包括位移也保持一致。这种多点约束在用曲面模拟板状实体时,可以连接不同的平面,从而可以使不同的曲面连接起来。
◆RSSCON Surf-V ol 建立二维板单元上一个从节点与三维体上两个主节点的MPC
约束,从而实现不同类型单元连接时的自由度传递。该约束常用在板壳与三维体的
焊接上,如图6-2所示。
图6-2 板-体连接
上图中定义的MPC-RSSCON卡片如下:
RSSCON 142 GRID 1 205 201
RSSCON 143 GRID 22 206 202
RSSCON 144 GRID 43 207 203
RSSCON 145 GRID 64 208 204
式中,1为板壳单元边上的节点,205、201为对应与节点1的三维体单元上节点,依次类推。另外,板-体连接也可用RBE3单元来实现。
◆Cyclic Symmetry 在两个不同的区域之间,建立一组柱面对称的多点约束边界条件
(轴对称的多点约束边界条件)。从patran的相应界面中可见,需要选择一个柱坐
标系,该坐标系的Z轴作为对称轴,在“Dependent Region”和"Independent Region"
文本框中,输入依赖节点和独立节点,依赖节点和独立节点必须成对出现,而且,
各节点对的角度差应该相等。
◆Sliding Surface 在两个相一致的区域的节点之间,定义一个滑动曲面。对应节点间
的移动自由度(即垂直于该曲面方向)被约束,但其他方向上保持自由。
◆RBE1
◆RBE2 刚性单元,作为一个十分简便的工具,其可将相同的几个在刚性连接在
一起。
式中
EID MPC编号,系统自动产生
GN 主节点号
CM 从节点自由度
GMi 从节点号
注意:(1)使用RBE2单元时,只能指定一个主节点,且主节点的六个自由度被用来参与对从节点的载荷分配或约束。
(2)RBE2单元与RBE1单元的区别是,RBE2的Independent只需定义节点,而不必指定自由度,因为他包含节点的6个自由度;但RBE1的Independent需要指定节
点自由度。
RBE2单元的使用范围:
(1)焊接:
(2)扭矩施加
(3)薄壁圆筒自由膨胀
◆RBE3 柔性单元,RBE3单元在分配载荷(力和力矩)方面是一个强有力的工具。
与RBER和RBE1单元不同的是,其在计算中不会增加系统的刚度。力和力矩在
RBE3单元的作用下,通过相应的权值,被从节点分配到一序列主节点上,且RBE3
的Independent自由度最好不要有旋转自由度。在实际应用中,RBE3单元没有RBE2
单元应用得广泛,原因是分配权值不好确定。
RBE3单元工作原理如下:
(1)将参考节点载荷(力与力矩)等效移至主节点围成面域的中心节点CG,生成新的力与力矩
A CG F F = e A A CG *F M M +=
(2)将CG 节点的力与力矩按照相应的权值,分配到各主节点上
各主节点获得的力,???
?
?
?*=∑
i i CG
if ωωF F 加上由力矩CG M 产生的力im F ,?
??? ??++=23322221
1F r r r r M i
i CG im ωωωω
EID MPC 编号,系统自动产生 REFGRID 参考节点(从节点)号 REFC 参考节点自由度
WTi 参考节点与主节点之间自由度的连接权值 Ci 主节点的自由度
Gi,j 对自由度Ci 的主节点号
“UM ” 防止系统产生刚体位移等的设置 GMi 防止刚体位移设置的节点
CMi 防止刚体位移设置的节点自由度
A
Reference Grid
CG
F CG
M CG
CG
M CG
F 1m
F 3m
F 2m
RBE3单元应用范围:弯矩施加、不同类型单元之间的连接(如梁-板连接、梁-体连接、板-体连接等)
◆RBAR 刚性梁单元,两节点之间的刚性连接(注意只限两节点间),即两节点间
6个自由度保持一致。
EID MPC编号,系统自动产生
GA、GB 定义RBAR单元的两节点号
CAN、CNB 全局坐标系下,两节点GA 、GB的主自由度
CMA、CMB 全局坐标系下,两节点GA 、GB的从自由度
注意:(1)定义RBAR单元时两节点的主自由度必须将该单元约束死,不能有任何刚体位移
(2)调整两节点中的某个自由度,可将“焊接”约束变成“铰接”约束,下图所示的RBAR单元B节点处连接方式为铰接。
RBAR单元使用范围:焊接、铰接
◆RBAR1
◆RROD 刚性杆单元
◆RSPLINE 内插约束单元,用于
◆RTRPLT 刚性三角板单元
◆RTRPLT1
◆RJOINT 刚性铰连接单元,铰的每个端点有6个自由度;
(整理中……)
abaqus接触问题技巧整理
接触问题技巧整理 1、塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是你收敛问题的主要原因。如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M. 2、接触对中的slave surface应该是材料较软,网格较细的面。 3、接触面之间有微小的距离,定义接触时要设定“Adjust=位置误差限度”,此误差限度要大于接触面之间的距离,否则ABAQUS会认为两个面没有接触:*Contact Pair, interaction="SOIL PILE SIDE CONTACT", small sliding, adjust=0.02 4、定义tie时也应该设定类似的position tolerance: *Tie, name=ShaftBottom, adjust=yes, position tolerance=0.1 5、msg文件中出现zero pivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了tie,又定义了contact, 出现过约束。解决方法是在选择tie或contact 的slave surface时,将类型设为node region, 然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。 6、接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在initial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。边界条件也是这样。 7、我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是12)。一般情况下不必设置此参数,如果在msg 文件中看到opening和closure的数目不断减小(即迭代的趋势是收敛的),但12次迭代仍不足以完全达到收敛,就可以用*CONTROL来增大允许的迭代次数。 8、桩头掉在了地表下,说明接触定义得不正确。可能接触面的距离还是大于*contact pair 中的adjust=0.02, 可改为adjust=0.2 9、原则上,90度的圆弧应该划分10个单元,适当少一些可能也行。 *contact pair中的adjust=0.005,还是太小,在后处理时可以看到,接触面之间的距离大于0.005。把adjust设置大一些没关系,比如adjust=0.1。 10、网格不好也可能产生过约束问题,不要只考虑边界条件啊! 11、NUMERICAL SINGULARITY WHEN PROCESSING NODE 15294 D.O.F. 2 RATIO = 2.48305E+11", 说明NODE 15294 所在的实体在方向2上出现无限大的刚体位移。 可以在此实体上的任意一点和地面之间定义一个很软的弹簧,以消除刚体位移。方法是:interaction模块,菜单special / springs-dashpots / create, 选connect points to ground, 选节点,Degree of freedom 设为出现了刚体位移的自由度,spring stiffness为一个较小的值(太小则不足以消除刚体位移,太大则会影响变形)。 如果多个方向上出现了刚体位移,就要分别在相应的方向上各定义一个弹簧。spring 所在的节点在弹簧方向的位移乘以spring stiffness,就是弹簧所分担的载荷,它应该远远小于在此方向上的外载荷。如果模型位移很小,我常常把spring stiffness设为1.
Abaqus Explicit 接触问题
1. Abaqus/Explicit 中的接触形式 双击Interactions,出现接触形式定义。分为通用接触(General contact)、面面接触(Surface-to-Surface contact)和自接触(Self-contact)。 1. 通用接触General contact 通用接触用于为多组件,并具有复杂拓扑关系的模型建模。 General contact algorithm ?The contact domain spans multiple bodies (both rigid and deformable) ?Default domain is defined automatically via an all-inclusive element-based surface ?The method is geared toward models with multiple components and complex topology。 ?Greater ease in defining contact model 2. Surface-to-Surface contact Contact pair algorithm ?Requires user-specified pairing of individual surfaces ?Often results in more efficient analyses since contact surfaces are limited in scope 3. 自接触(Self-contact) 自接触应用于当部件发生变形时,可能导致自己的某两个或多个面发生接触的情况。如弹簧的压缩变形,橡胶条的压缩。
abaqus接触动力学分析
部件模态综合法 随着科学和生产的发展,特别是航空、航天事业的发展,越来越多的大型复杂结构被采用,这使得建模和求解都比较困难。一方面,一个复杂结构势必引入较多的自由度,形成高维的动力学方程,使一般的计算机在内存和求解速度方面都难以胜任,更何况一般的工程问题主要关心的是较低阶的模态。仅为了获取少数的几个模态,必须为求解高维方程付出巨大的代价也是不合适的。另一方面,正是由于结构的庞大和复杂,一个完整的结构往往不是在同一地区生产完成的,可能一个结构的各个主要零部件不得不由不同的地区、不同的厂家生产。而且由于试验条件的限制只能进行部件的模态实验,而无法对整体结构进行模态实验。针对这些主要的问题,为了获得大型、复杂结构的整体模态参数,于是发展了部件模态综合法。 部件模态综合法又叫子结构耦合法。它的基本思想是按工程观点或结构的几何轮廓,并遵循某些原则要求,把完整的结构进行人为抽象肢解成若干个子结构(或部件);首先对子结构(或部件)进行模态分析,然后经由各种方案,把它们的主要模态信息(常为低阶主模态信息)予以保留,并借以综合完整结构的主要模态特征。它的主要有点是,可以通过求解若干小尺寸结构的特征问题来代替直接求解大型特征值问题。同时对各个子结构可分别使用各种适宜的数学模型和计算程序,也可以借助试验的方法来获得他们的主要模态信息。 对于自由振动方程在数学上讲就是固有(特征)值方程。特征值方程的解不仅给出了特征值,即结构的自振频率和特征矢量——振兴或模态,而且还能使结构在动力载荷作用下的运动方程解耦,即所谓的振型分解法或叫振型叠加法。因此,特征值问题的求解技术,对于解决结构振动问题来说吧,是非常重要的。 考虑阻尼的振型叠加法 振型叠加法的定义:将结构各阶振型作为广义坐标系,求出对应于各阶振动的结构内力和位移,经叠加后确定结构总响应的方法。 振型叠加法的使用条件: ?(1)系统应该是线性的:线性材料特性,无接触条件,无非线性几何效应。 ?(2)响应应该只受较少的频率支配。当响应中各频率成分增加时,例如撞击和冲击问题,振型叠加技术的有效性将大大降低。 ?(3)载荷的主要频率应在所提取的频率范围内,以确保对载荷的描述足够精确。 ?(4)由于任何突然加载所产生的初始加速度应该能用特征模态精确描述。 ?(5)系统的阻尼不能过大。
abaqus接触分析的常见问题
CAE(计算机辅助工程)是一门复杂的工程科学,涉及仿真技术、软件、产品设计和力学等众多领域。世界上几大CAE公司各自以其独到的技术占领着相应的市场。ABAQUS有限元分析软件拥有世界上最大的非线性力学用户群,是国际上公认的最先进的大型通用非线性有限元分析软件之一。它广泛应用于机械制造、石油化工、航空航天、汽车交通、土木工程、国防军工、水利水电、生物医学、电子工程、能源、地矿、造船以及日用家电等工业和科学研究领域。ABAQUS在技术、品质和可靠性等方面具有卓越的声誉,可以对工程中各种复杂的线性和非线性问题进行分析计算。 《ABAQUS有限元分析常见问题解答》以问答的形式,详细介绍了使用ABAQUS建模分析过程中的各种常见问题,并以实例的形式教给读者如何分析问题、查找错误原因和尝试解决办法,帮助读者提高解决问题的能力。 《ABAQUS有限元分析常见问题解答》一书由机械工业出版社出版。 16.1.1点对面离散与面对面离散 【常见问题16-1】 在ABAQUS/Standard分析中定义接触时,可以选择点对面离散方法(node-to-surfac e-dis-cre-tization)和面对面离散方法(surface-to-surfacediscretization),二者有何差别? 『解答』 在点对面离散方法中,从面(slavesurface)上的每个节点与该节点在主面(mastersur face)上的投影点建立接触关系,每个接触条件都包含一个从面节点和它的投影点附近的一组主面节点。 使用点对面离散方法时,从面节点不会穿透(penetrate)主面,但是主面节点可以穿透从面。 面对面离散方法会为整个从面(而不是单个节点)建立接触条件,在接触分析过程中同时考虑主面和从面的形状变化。可能在某些节点上出现穿透现象,但是穿透的程度不会很严重。 在如图16-l和图16-2所示的实例中,比较了两种情况。
ABAQUS接触分析
1、塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是你收敛问题的主要原因。如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M。 2、接触对中的slave surface应该是材料较软,网格较细的面。 3、接触面之间有微小的距离,定义接触时要设定“Adjust=位置误差限度”,此误差限度要大于接触面之间的距离,否则ABAQUS会认为两个面没有接触:*Contact Pair, interaction="SOIL PILE SIDE CONTACT", small sliding, adjust=0.2. 4、定义tie时也应该设定类似的position tolerance: *Tie, name=ShaftBottom, adjust=yes, position tolerance=0.1 5、msg文件中出现zero pivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了tie,又定义了contact, 出现过约束。解决方法是在选择tie或contact的slave surface时,将类型设为node region, 然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。 6、接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在initial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。边界条件也是这样。 7、我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是12)。一般情况下不必设置此参数,如果在msg文件中看到opening和closure的数目不断减小(即迭代的趋势是收敛的),但12次迭代仍不足以完全达到收敛,就可以用*CONTROL来增大允许的迭代次数。 8、桩头掉在了地表下,说明接触定义得不正确。可能接触面的距离还是大于*contact pair 中的adjust=0.02, 可改为adjust=0.2 9、原则上,90度的圆弧应该划分10个单元,适当少一些可能也行。 *contact pair中的adjust=0.005,还是太小,在后处理时可以看到,接触面之间的距离大于0.005。把adjust设置大一些没关系,比如 adjust=0.1。 10、网格不好也可能产生过约束问题,不要只考虑边界条件啊!NUMERICAL SINGULARITY WHEN PROCESSING NODE 15294
ABAQUS有限元接触分析的基本概念
ABAQUS有限元接触分析的基本概念 来源:机械工业出版社《ABAQUS有限元分析常见问题解答》 CAE(计算机辅助工程)是一门复杂的工程科学,涉及仿真技术、软件、产品设计和力学等众多领域。世界上几大CAE公司各自以其独到的技术占领着相应的市场。ABAQUS有限元分析软件拥有世界上最大的非线性力学用户群,是国际上公认的最先进的大型通用非线性有限元分析软件之一。它广泛应用于机械制造、石油化工、航空航天、汽车交通、土木工程、国防军工、水利水电、生物医学、电子工程、能源、地矿、造船以及日用家电等工业和科学研究领域。ABAQUS在技术、品质和可靠性等方面具有卓越的声誉,可以对工程中各种复杂的线性和非线性问题进行分析计算。 《ABAQUS有限元分析常见问题解答》以问答的形式,详细介绍了使用ABAQUS建模分析过程中的各种常见问题,并以实例的形式教给读者如何分析问题、查找错误原因和尝试解决办法,帮助读者提高解决问题的能力。 《ABAQUS有限元分析常见问题解答》一书由机械工业出版社出版。 16.1.1 点对面离散与面对面离散 【常见问题16-1】 在ABAQUS/Standard分析中定义接触时,可以选择点对面离散方法(node-to-surface-dis- cre-tization)和面对面离散方法(surface-to-surface discretization),二者有何差别? 『解答』 在点对面离散方法中,从面(slave surface)上的每个节点与该节点在主面(master surface)上的投影点建立接触关系,每个接触条件都包含一个从面节点和它的投影点附近的一组主面节点。 使用点对面离散方法时,从面节点不会穿透(penetrate)主面,但是主面节点可以穿透从面。 面对面离散方法会为整个从面(而不是单个节点)建立接触条件,在接触分析过程中同时考虑主面和从面的形状变化。可能在某些节点上出现穿透现象,但是穿透的程度不会很严重。 在如图16-l和图16-2所示的实例中,比较了两种情况。
基于有限元软件ABAQUS的过盈接触分析
基于有限元软件ABAQUS的过盈接触分析 如下图所示,将轴缓缓压入轴毂中,轴和毂之间在径向有8mm的过盈量,轴毂固定,两者的材料均为钢,弹性模量为2.06E11Pa,泊松比为0.3,摩擦系数为0.2。分析装配过程中轴和轴毂的应力应变情况。 问题分析 (1)本题主要分析装配过程中结构的静态响应,所以分析步选择通用静态分析步。 (2)本题由于为过盈配合,属于大变形,故应考虑几何非线性的影响。 (3)模型具有轴对称性,所以可以采取轴对称模型来进行分析,这样可以节省计算时间。 (4)为了方便收敛,分析步可以分成两步,第一步建立两者间的接触关系,第二步完成过盈装配。 (5)接触面之间有很大的相对滑动,所以模型要使用有限滑移(Finite sliding)。 ABAQUS/CAE分析过程如下: (1)进入Part模块,创建Name为Axis的部件
在草图环境中输入(0,0),(0.1,0),(0.1,0.12),(0.13,0.12),(0.13,0.28),(0,0.28),(0,0)同时为轴部件端部切割出一78度角的倒角 同样再创造一Name为Hub的部件,设置与Axis一样,在草图环境中输入利用Rectangle工具创建一矩形,两角点为(0.09992,0)和(0.19992,-0.12)
(2) 进入property 模块,定义材料属性
(3)进入Assembly模块,创建两者间的装配关系
(4)进入step模块 定义名为Make-Contact和Press-Axis-Down的两个分析步,,将Nlgeom设置 为on,详细信息如下:
abaqus接触问题分析
abaqus接触分析 1、塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是你收敛问题的主要原因。如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M。 2、接触对中的slave surface应该是材料较软,网格较细的面。 3、接触面之间有微小的距离,定义接触时要设定“Adjust=位置误差限度”,此误差限度要大于接触面之间的距离,否则ABAQUS会认为两个面没有接触: *Contact Pair, interaction="SOIL PILE SIDE CONTACT", small sliding, adjust=0.2. 4、定义tie时也应该设定类似的position tolerance: *Tie, name=ShaftBottom, adjust=yes, position tolerance=0.1 5、msg文件中出现zero pivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了tie,又定义了contact, 出现过约束。解决方法是在选择tie或contact的slave surface时,将类型设为node region, 然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。 6、接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在initial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。边界条件也是这样。 7、我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是12)。一般情况下不必设置此参数,如果在msg文件中看到opening和closure的数目不断减小(即迭代的趋势是收敛的),但12次迭代仍不足以完全达到收敛,就可以用*CONTROL来增大允许的迭代次数。 8、桩头掉在了地表下,说明接触定义得不正确。可能接触面的距离还是大于*contact pair 中的adjust=0.02, 可改为adjust=0.2 9、原则上,90度的圆弧应该划分10个单元,适当少一些可能也行。 *contact pair中的adjust=0.005,还是太小,在后处理时可以看到,接触面之间的距离大于0.005。把adjust设置大一些没关系,比如adjust=0.1。 10、网格不好也可能产生过约束问题,不要只考虑边界条件啊!NUMERICAL SINGULARITY WHEN PROCESSING NODE 15294 D.O.F. 2 RATIO =2.48305E+11", 说明NODE 15294 所在的实体在方向2上出现无限大的刚体位移。可以在此实体上的任意一点和地面之间定义一个很软的弹簧,以消除刚体位移。方法是:interaction模块,菜单special / springs-dashpots / create, 选connect points to ground, 选节点,Degree of freedom 设为出现了刚体位移的自由度,spring stiffness为一个较小的值(太小则不足以消除刚体位移,太大则会影响变形如果多个方向上出现了刚体位移,就要分别在相应的方向上各定义一个弹簧。spring 所在的节点在弹簧方向的位移乘以spring stiffness,就是弹簧
ABAQUS有限元接触分析的基本概念
ABAQUS有限元接触分析的基本概念 相关专题:模具技术文献 时间:2009-05-06 05:55 来源:中国塑料模具网 CAE(计算机辅助工程)是一门复杂的工程科学,涉及仿真技术、软件、产品设计和力学等众多领域。世界上几大CAE公司各自以其独到的技术占领着相应的市场。ABAQUS有限元分析软件拥有世界上最大的非线性力学用户群,是国际上公认的最先进的大型通用非线性有限元分析软件之一。它广泛应用于机械制造、石油化工、航空航天、汽车交通、土木工程、国防军工、水利水电、生物医学、电子工程、能源、地矿、造船以及日用家电等工业和科学研究领域。ABAQUS在技术、品质和可靠性等方面具有卓越的声誉,可以对工程中各种复杂的线性和非线性问题进行分析计算。 《ABAQUS有限元分析常见问题解答......》以问答的形式,详细介绍了使用ABAQUS建模分析过程中的各种常见问题,并以实例的形式教给读者如何分析问题、查找错误原因和尝试解决办法,帮助读者提高解决问题的能力。 《ABAQUS有限元分析常见问题解答......》一书由机械工业出版社出版。 16.1.1点对面离散与面对面离散 【常见问题16-1】 在ABAQUS/Standard分析中定义接触时,可以选择点对面离散方法 (node-to-surface-dis-cre-tization)和面对面离散方法(surface-to-surfacediscretization),二者有何差别? 『解答』 在点对面离散方法中,从面(slavesurface)上的每个节点与该节点在主面(mastersurface)上的投影点建立接触关系,每个接触条件都包含一个从面节点和它的投影点附近的一组主面节点。 使用点对面离散方法时,从面节点不会穿透(penetrate)主面,但是主面节点可以穿透从面。 面对面离散方法会为整个从面(而不是单个节点)建立接触条件,在接触分析过程中同时考虑主面和从面的形状变化。可能在某些节点上出现穿透现象,但是穿透的程度不会很严重。 在如图16-l和图16-2所示的实例中,比较了两种情况。
abaqus 接触问题
1.1点对面离散与面对面离散 【常见问题1-1】 在ABAQUS/Standard分析中定义接触时,可以选择点对面离散方法 (node-to-surface-dis-cre-tization)和面对面离散方法(surface-to-surface discretization),二者有何差别? 『解答』 在点对面离散方法中,从面(slave surface)上的每个节点与该节点在主面(master surface)上的投影点建立接触关系,每个接触条件都包含一个从面节点和它的投影点附近的一组主面节点。 使用点对面离散方法时,从面节点不会穿透(penetrate)主面,但是主面节点可以穿透从面。 面对面离散方法会为整个从面(而不是单个节点)建立接触条件,在接触分析过程中同时考虑主面和从面的形状变化。可能在某些节点上出现穿透现象,但是穿透的程度不会很严重。 在如图l和图2所示的实例中,比较了两种情况。 1)从面网格比主面网格细:点对面离散(图16-1a)和面对面离散(图16-2a)的分析结果都很好,没有发生穿透,从面和主面都发生了正常的变形。 2)从面网格比主面网格粗:点对面离散(图16-1b)的分析结果很差,主面节点进入了从面,穿透现象很严重,从面和主面的变形都不正常;面对面离散(图16-2b)的分析结果相对较好,尽管有轻微的穿透现象,从面和主面的变形仍比较正常。 从上面的例子可以看出,在为接触面划分网格时需要慎重,无论使用点对面离散还是面对面离散,都应尽量保证从面网格不能比主面网格粗。关于从面和主面的选择方法,请参见《实例详解》第5.2.2节“定义接触对”。 选用离散方法时,还应考虑以下因素。 1)一般情况下,面对面离散得到的应力和压强的结果精度要高于点对面离散。 2)面对面离散需要分析整个接触面上的接触行为,其计算代价要高于点对面离散。一般情况下,二者的计算代价相差不是很悬殊,但在以下情况中,面对面离散的计算代价将会大很多: ①模型中的大部分区域都涉及到接触问题。 ②主面的网格比从面的网格细化很多。 ③接触对中包含了多层壳,一个接触对中的主面是另一接触对中的从面。 3)如果从面是基于节点的(即从面类型为Node Region,而不是Surface),则不能使用面对面离散化方法。
ABAQUS接触问题分析
ctrle ctrle https://www.sodocs.net/doc/133272767.html,/zn1125 2012-03-26 10:56:26 1、 塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是你收敛问题的主要原因。如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M。 2、 接触对中的slave surface应该是材料较软,网格较细的面。 3、 接触面之间有微小的距离,定义接触时要设定“Adjust=位置误差限度”,此误差限度要大于接触面之间的距离,否则ABAQUS会认为两个面没有接 触:*Contact Pair, interaction="SOIL PILE SIDE CONTACT", small sliding, adjust=0.2. 4、 定义tie时也应该设定类似的position tolerance: *Tie, name=ShaftBottom, adjust=yes, position tolerance=0.1 5、 msg文件中出现zero pivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了tie,又定义了contact, 出现过约束。解决方法是在选择tie或contact的slave surface时,将类型设为node region, 然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。 6、 接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在initial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。边界条件也是这样。 7、 我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是12)。一般情况下不必设置此参数,如果在msg文件中看到opening和closure的数目不断减小(即迭代的趋势是收敛的),但12次迭代仍不足以完全达到收敛,就可以用*CONTROL来增大允许的迭代次数。 8、 桩头掉在了地表下,说明接触定义得不正确。可能接触面的距离还是大 于*contact pair 中的adjust=0.02, 可改为adjust=0.2 9、 原则上,90度的圆弧应该划分10个单元,适当少一些可能也行。 *contact pair中的adjust=0.005,还是太小,在后处理时可以看到,接触面之间的距离大于0.005。把adjust设置大一些没关系,比如adjust=0.1。 10、 网格不好也可能产生过约束问题,不要只考虑边界条件啊! NUMERICAL SINGULARITY WHEN PROCESSING NODE 15294 D.O.F. 2 RATIO =2.48305E+11",说明NODE 15294 所在的实体在方向2上出现无限大的刚体位移。可以在此实体上的任意一点和地面之间定义一个很软的弹簧,以消除刚体位移。方法 是:interaction模块,菜单special / springs-dashpots / create, 选connect points to ground, 选节点,Degree of freedom 设为出现了刚体位移的自由度,spring stiffness为一个较小的值(太小则不足以消除刚体位移,太大则会影响变形如果多个方向上出现了刚体位移,就要分别在相应的方向上各定义一个弹簧。spring 所在的节点在弹簧方向的位移乘以spring stiffness,就是弹簧所分担的载荷,它应该远远小于在此方向上的外载荷。如果模型位移很小,我常常把spring stiffness设为1.
相关文档
- abaqus接触动力学分析
- abaqus接触问题汇总(转自SIMWE)
- 第七讲 abaqus接触分析分解
- abaqus接触问题技巧整理
- ABAQUS接触例题
- 基于有限元软件ABAQUS的过盈接触分析
- Abaqus Explicit 接触问题
- Abaqus Explicit 接触问题
- ABAQUS接触分析
- Abaqus CAE中的分析步 接触和载荷
- ABAQUS接触问题分析
- abaqus接触分析的常见问题
- 第七讲abaqus接触分析
- ABAQUS有限元接触分析的基本概念
- ABAQUS中的约束和接触
- Abaqus接触分析中的收敛问题
- abaqus接触分析的常见问题
- abaqus 接触问题
- abaqus接触分析的常见问题
- ABAQUS有限元接触分析的基本概念